The assembly of the new cooling system for the TCS auxiliary lasers is complete.
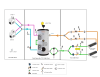
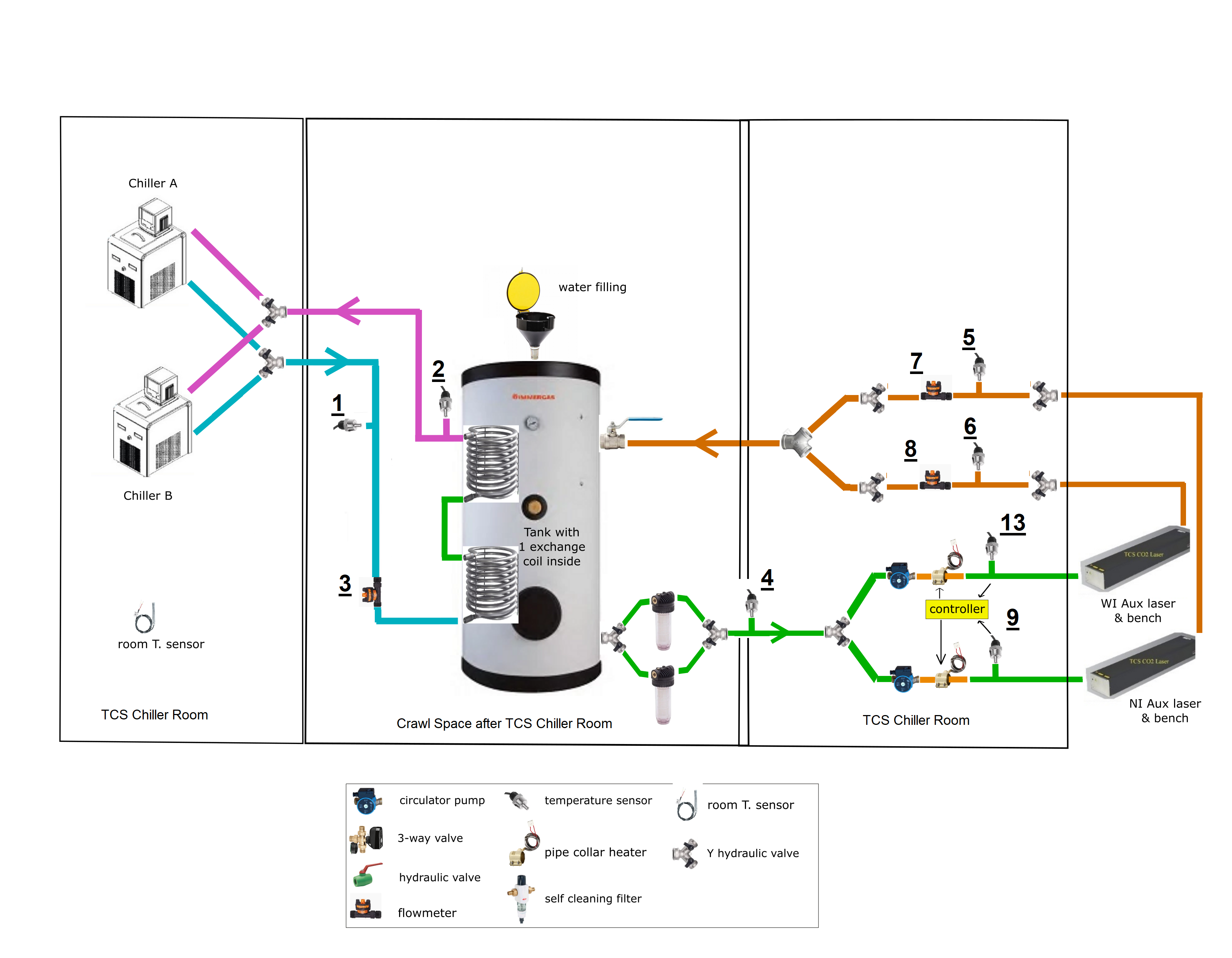
It is a two-stage system (pic 1 - schematics)
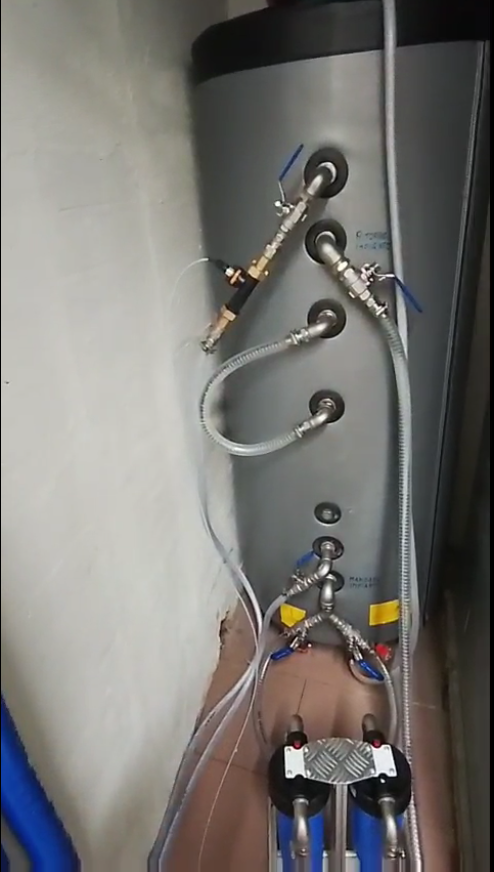
1. Primary stage –. The tank temperature is maintained by one of two chillers, operating in a redundant configuration: one unit designated as the primary chiller (working) and a second unit
as a (non operating until needed) backup, to ensure continuous operation. In case of failure, the operator on shift will only have to switch the piping from one chiller to the other (pic 2: AuxCooling Chiller)
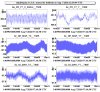
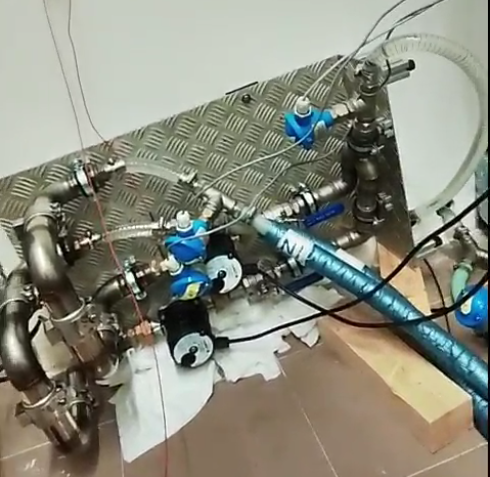
2. Secondary stage – From the tank (pic 3 - AuxCooling Tank), water is distributed through two separate piping and valve systems, one per laser (pic 4 (temporary) - Distribution and post-heating system assembly phase). Each system includes four pipe collar heaters, enabling post-heating control of the oscilations in temperature, to keep them within the 0.1 limit (more details in future entries that will be posted as comments of this one).
New sensors were installed and new channels were created, soon to be implemented on DMS. Together with the old ones, the system can be monitored using (see schematics):
- INF_TCS_AuxCooling_Pri_OUT_TE (chiller --> tank)
- INF_TCS_AuxCooling_Pri_IN_TE (tank --> chiller)
- INF_TCS_AuxCooling_Pri_FLOW (chiller --> tank)
- INF_TCS_AuxCooling_Tank_OUT_TE (tank --> circulators)
- INF_TCS_AuxCooling_NI_IN_TE (NI utilities --> tank)
- INF_TCS_AuxCooling_WI_IN_TE (WI utilities --> tank)
- INF_TCS_AuxCooling_NI_FLOW (NI utilities --> tank)
- INF_TCS_AuxCooling_WI_FLOW (WI utilities --> tank)
- HVAC_TCS_NI_TE (placed after the resistors, used for the post-heating control loop)
- HVAC_TCS_NI_TE_SET (post-heating control loop)
- HVAC_TCS_NI_ALARM (post-heating control loop)
- HVAC_TCS_NI_CORR (post-heating control loop)
- HVAC_TCS_WI_TE (placed after the resistors, used for the post-heating control loop)
- HVAC_TCS_WI_TE_SET (post-heating control loop)
- HVAC_TCS_WI_ALARM (post-heating control loop)
- HVAC_TCS_WI_CORR (post-heating control loop)
- INF_TCS_AuxCooling_NI_IN (temperature of NI laser, already in use)
- INF_TCS_AuxCooling_WI_IN (temperature of WI laser, already in use)
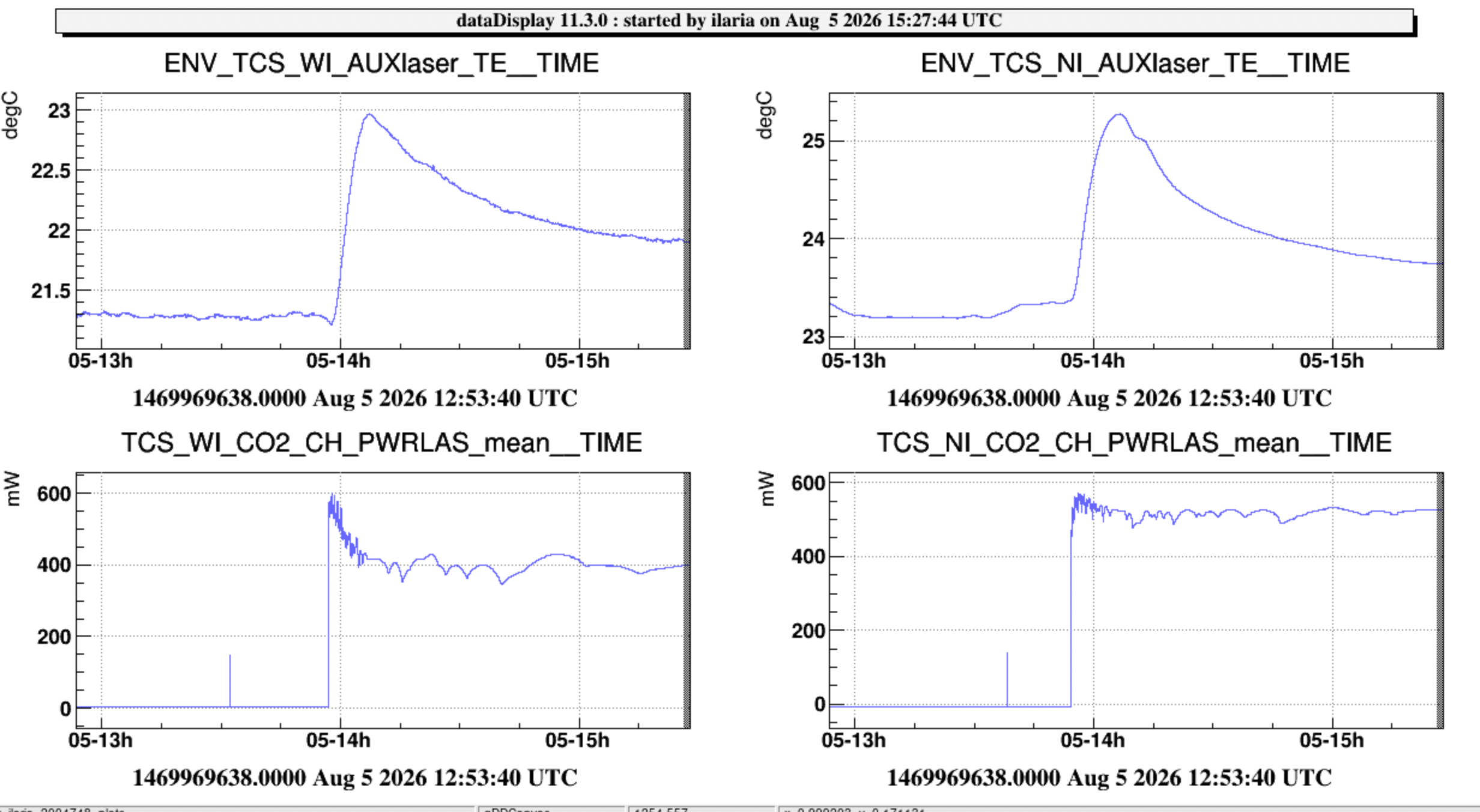
- TCS_NI_CO2_CH_PWRLAS (NI laser power, already in use)
- TCS_WI_CO2_CH_PWRLAS (WI laser power, already in use)



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}