During Monday afternoon:
-
The alignment plates were retrieved from the washing room.
-
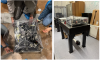
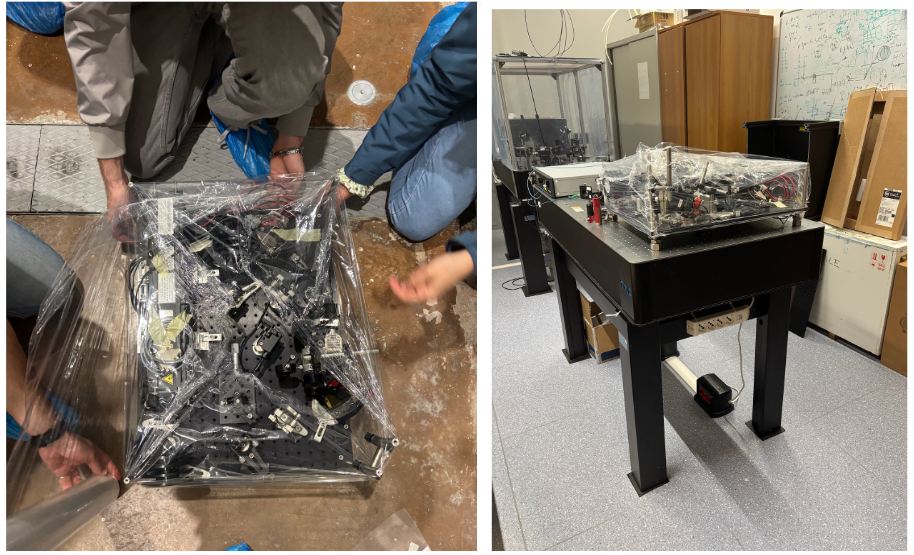
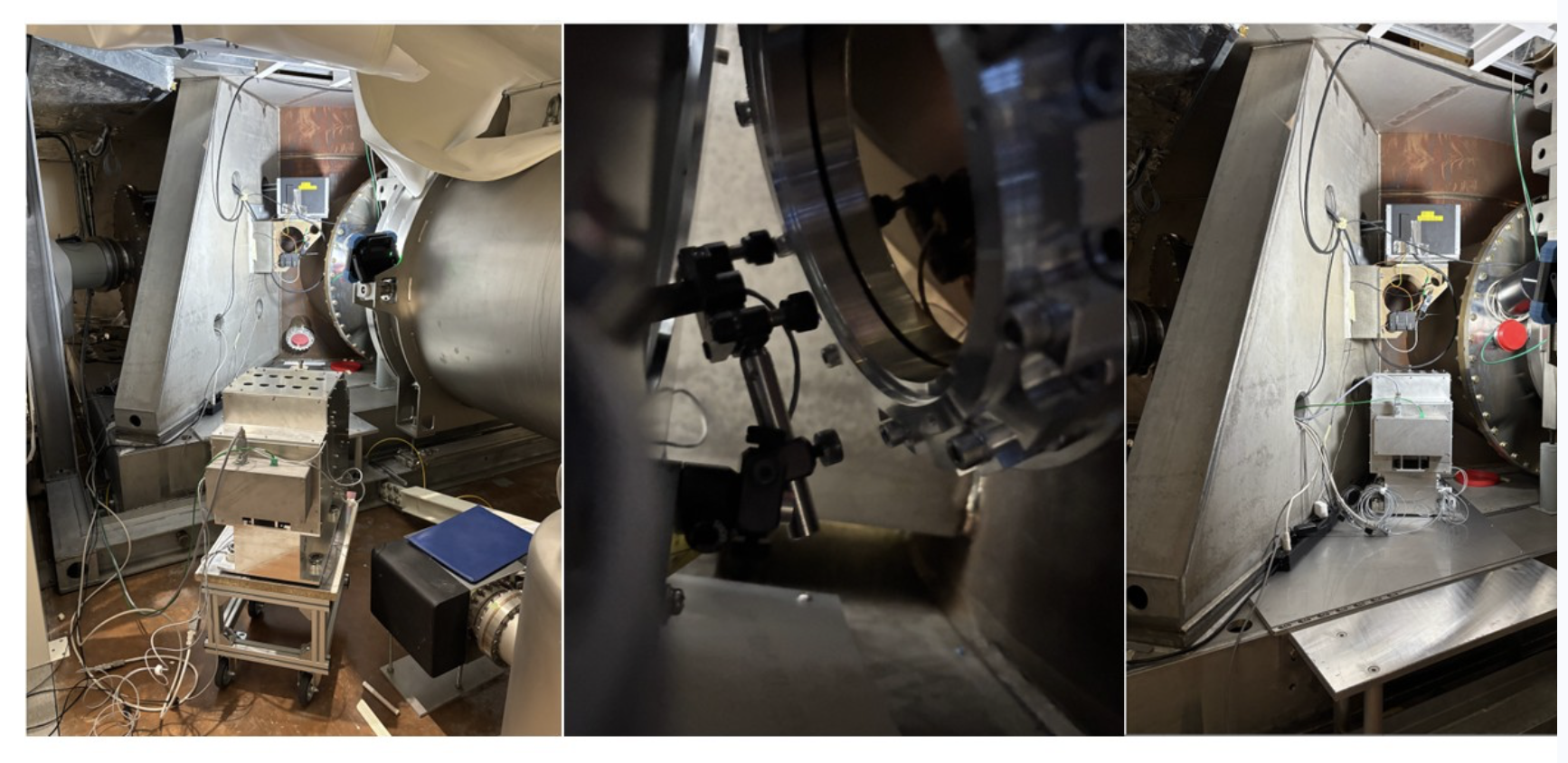
The IPATSiA optical bench was moved from the WI tower base to the optics lab (see Fig.1)
-
In parallel, the cabling of the picomotors was carried out in the TCS room by Giulio and Elian
On Tuesday:
-
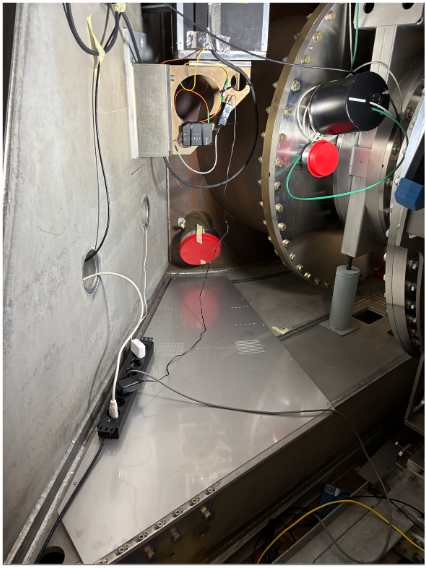
The alignment plate was installed on the WI tower base together with Alessio B. and Angelo (see Fig. 2)
-
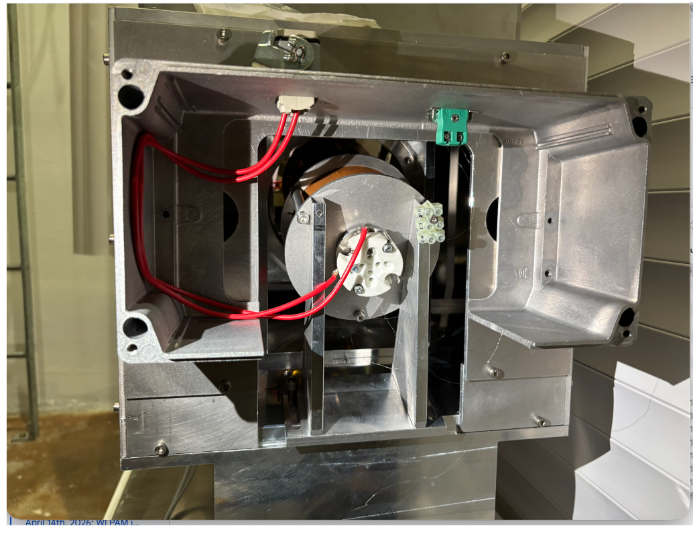
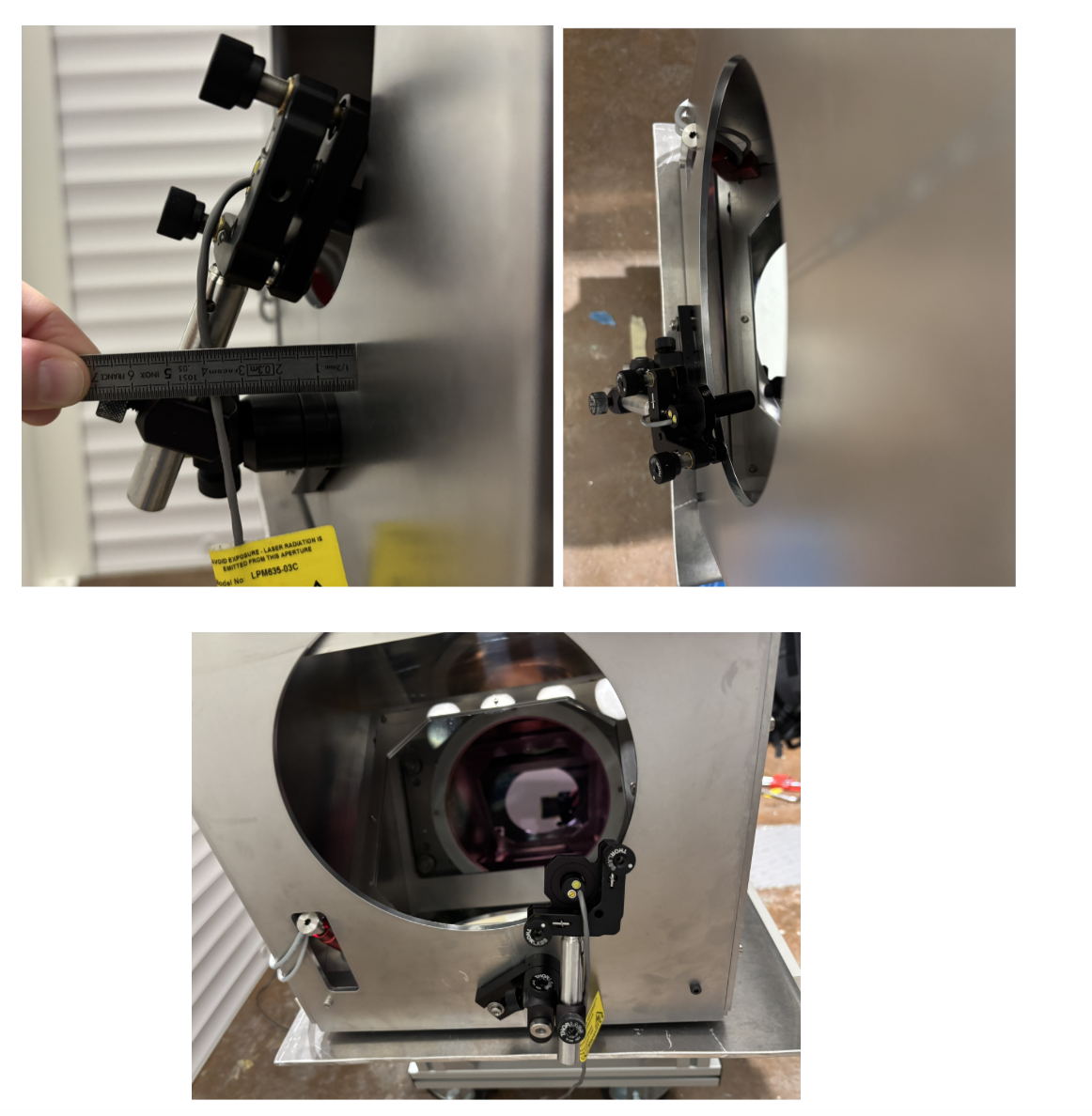
The LED setup used to ease the alignment on the HR surface was also integrated on the actuator (see Fig. 3).
-
The picomotors were cabled on the actuator side using CABLE 003 (TX) and CABLE 004 (TY).
Finally, a remote driving test of the picomotors was performed with Giulio, confirming proper operation.
Specifically, from the VPM interface:- TY+ → move the beam to the right on the HR face
- TY− → move the beam to the left on the HR face
- TX+ → move the beam upward on the HR face
- TX− → move the beam downward on the HR face
-
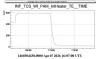
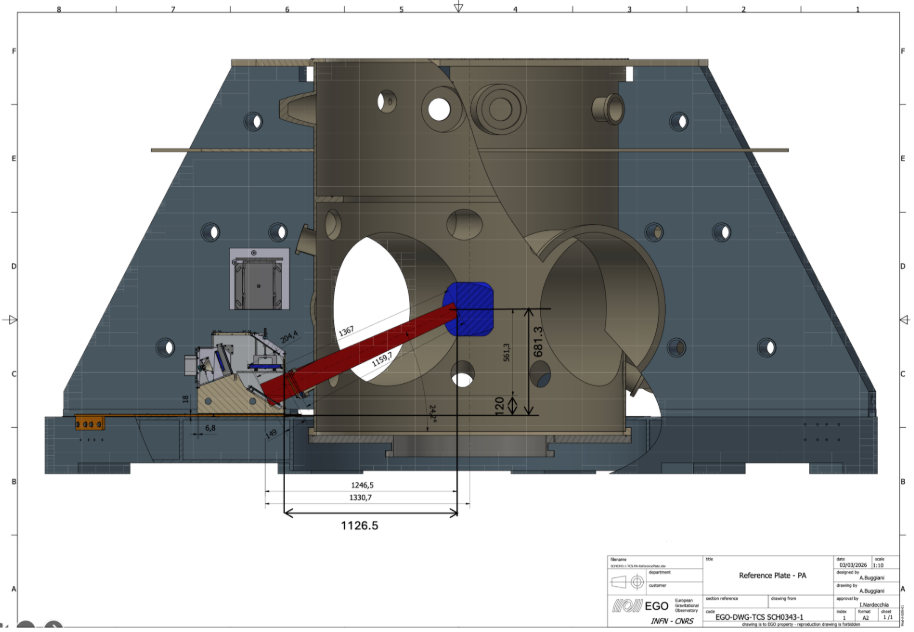
Then, the picomotors have been calibrated using the LED to the nominal actuator-TM design distance [Actuator–TM distance = 1126.5 mm | Height between the actuator base and TM center = 681.3 mm, as shown in Fig. 4].
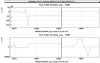
We estimated:- 1 cm on TY =6666 steps
- 1 cm on TX =5555 steps
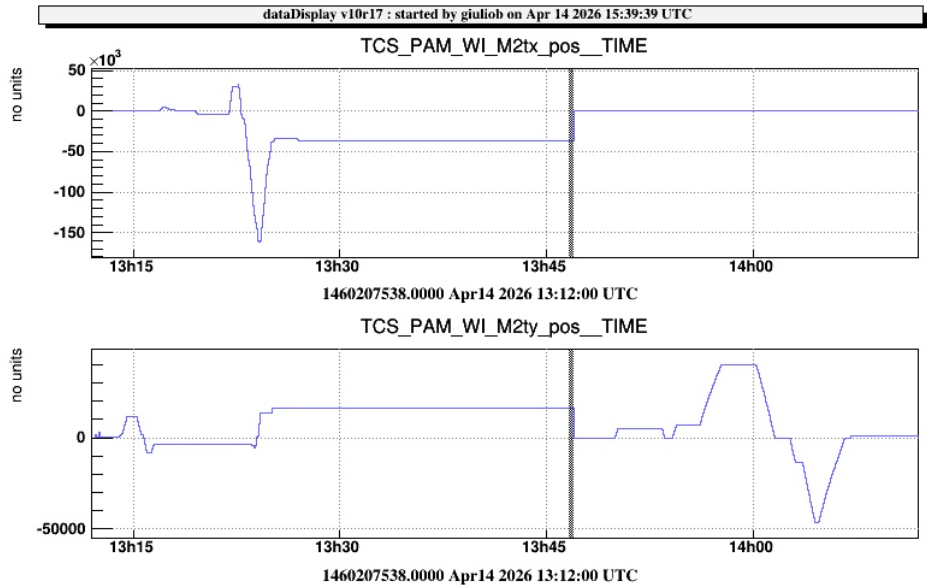
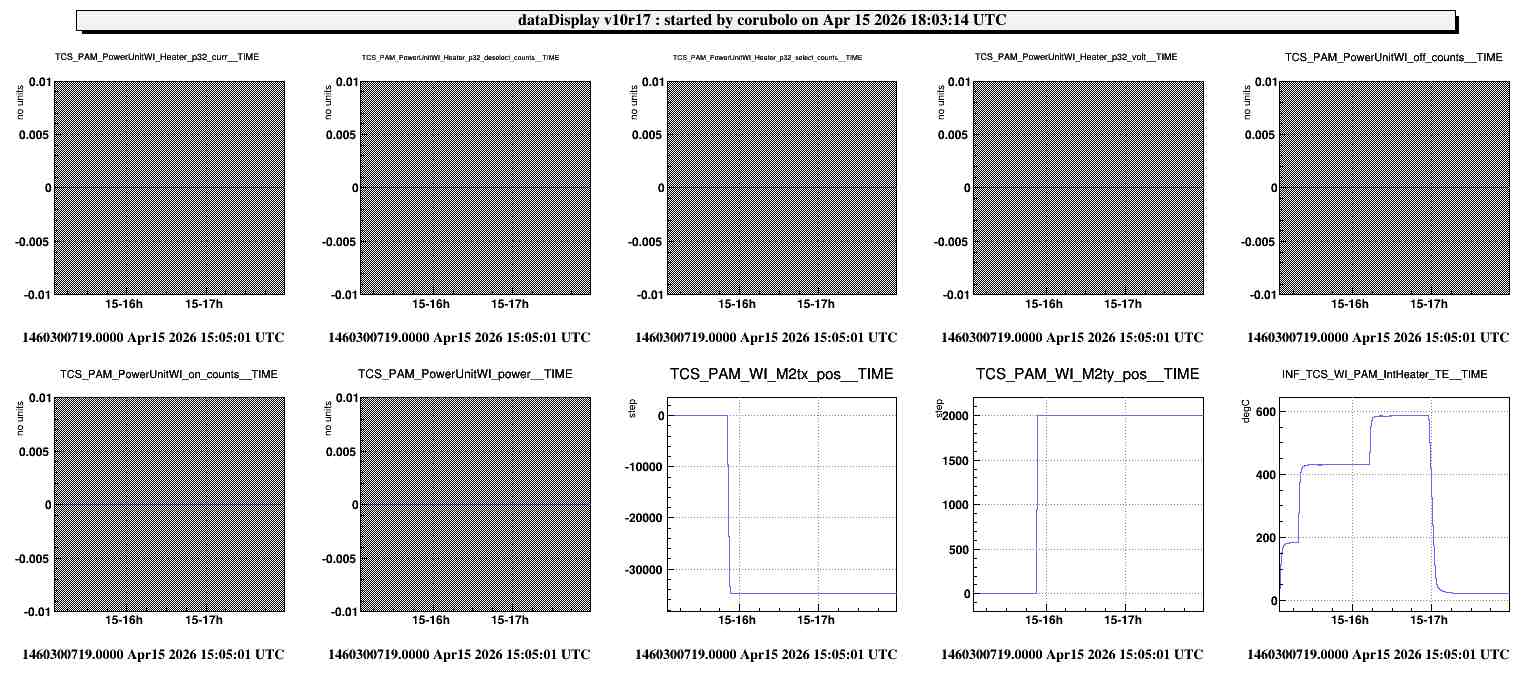
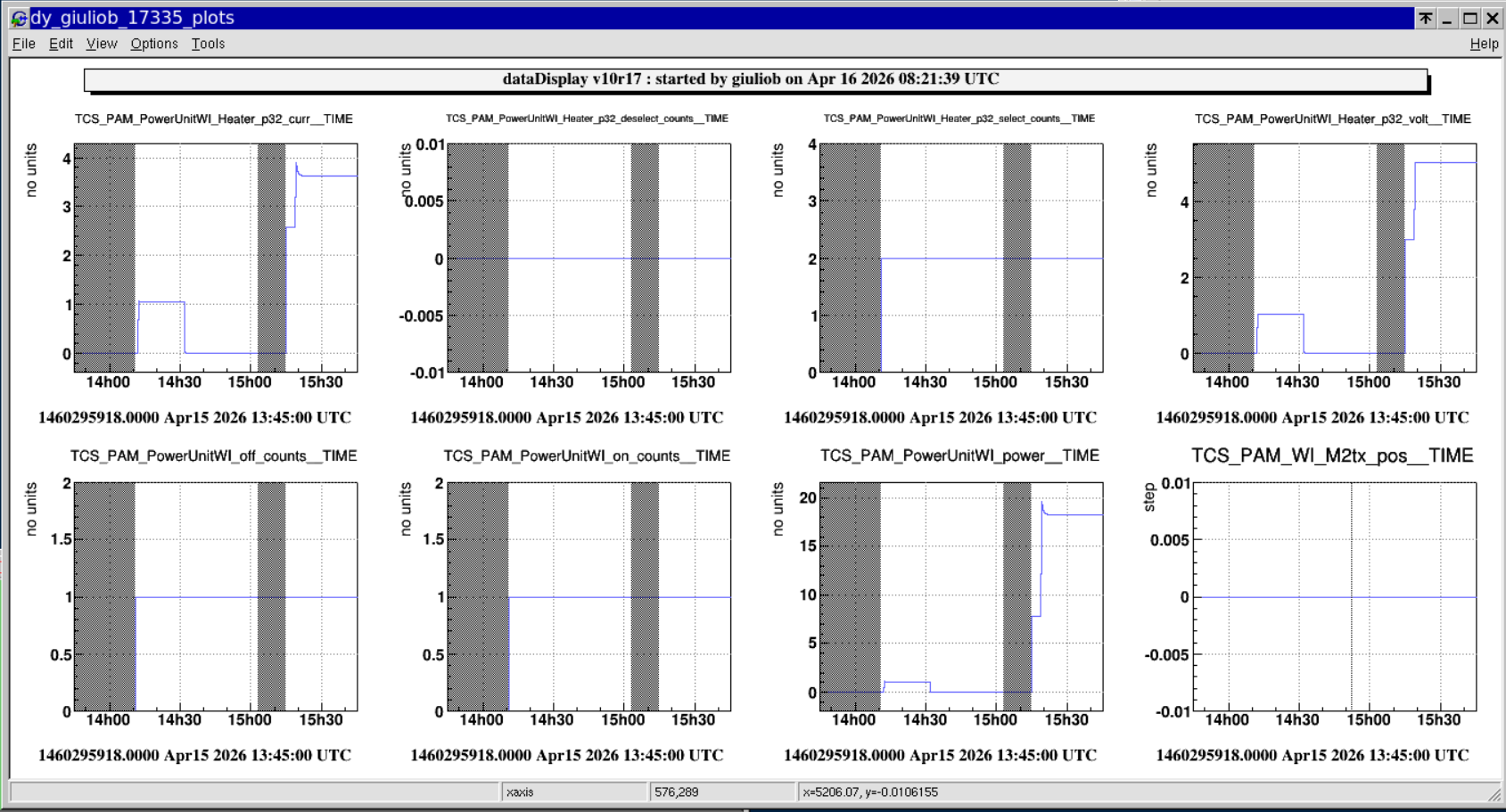
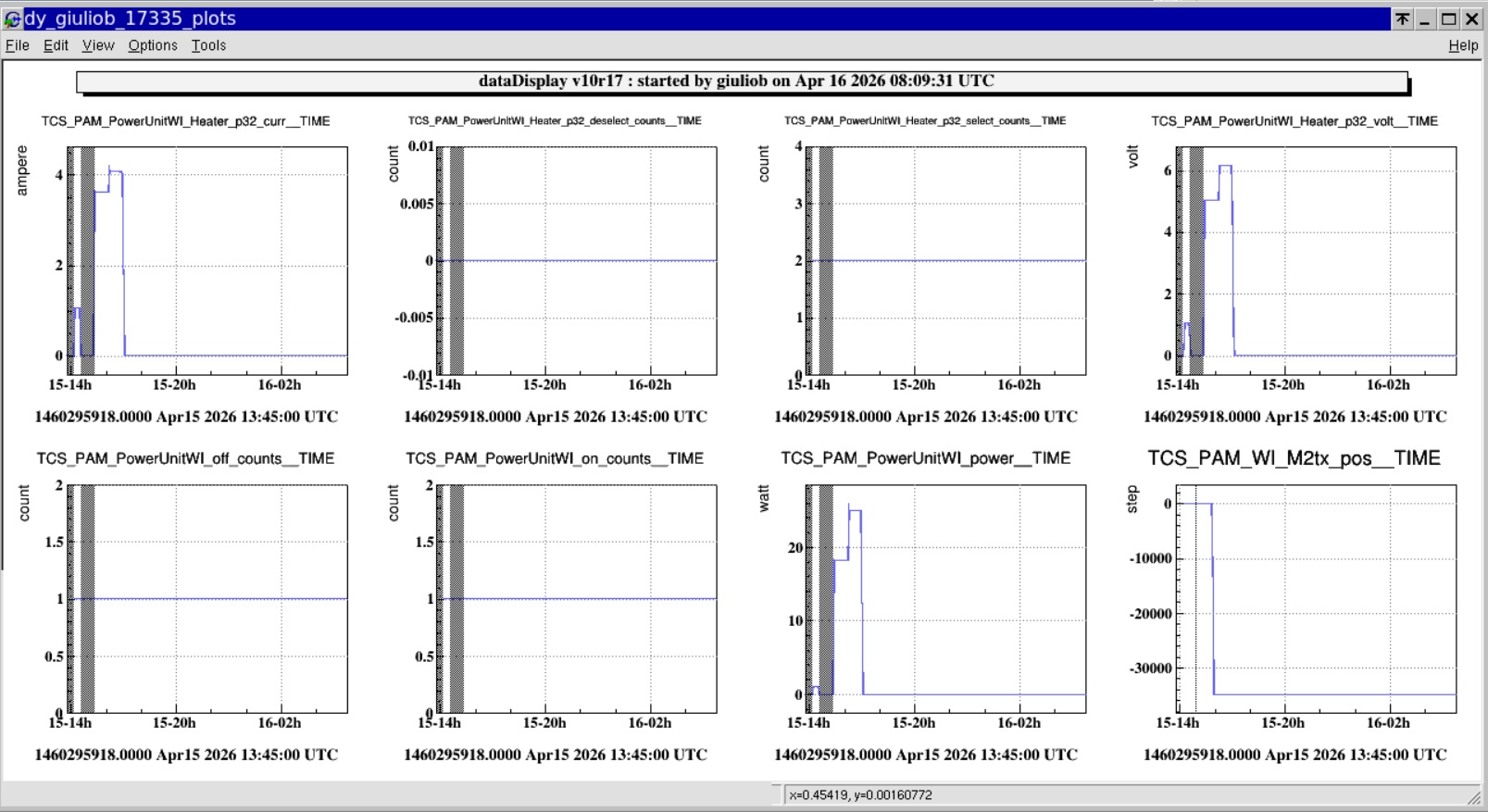
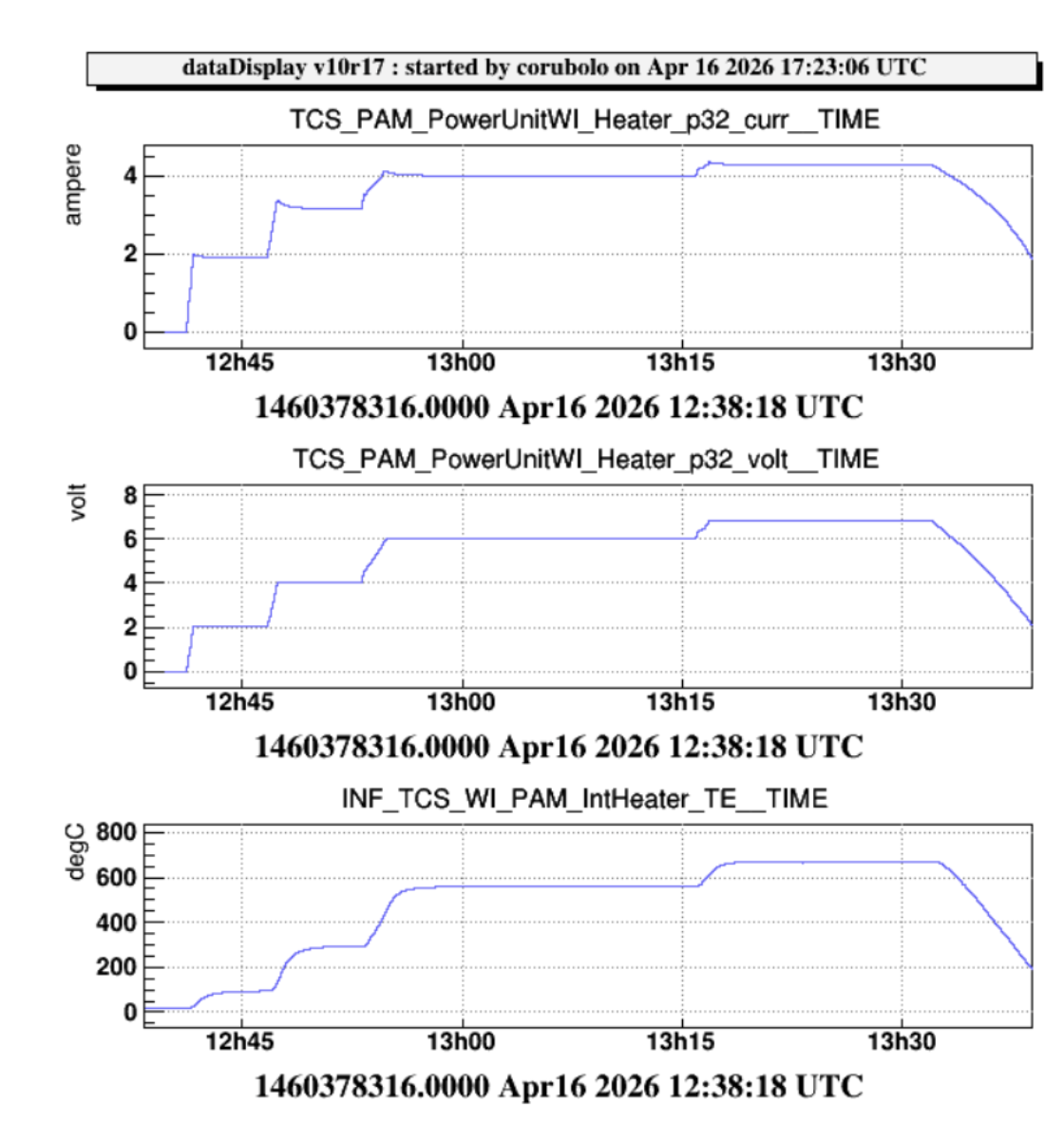
- The movements of the picomotors are available on DD (see Fig. 5).
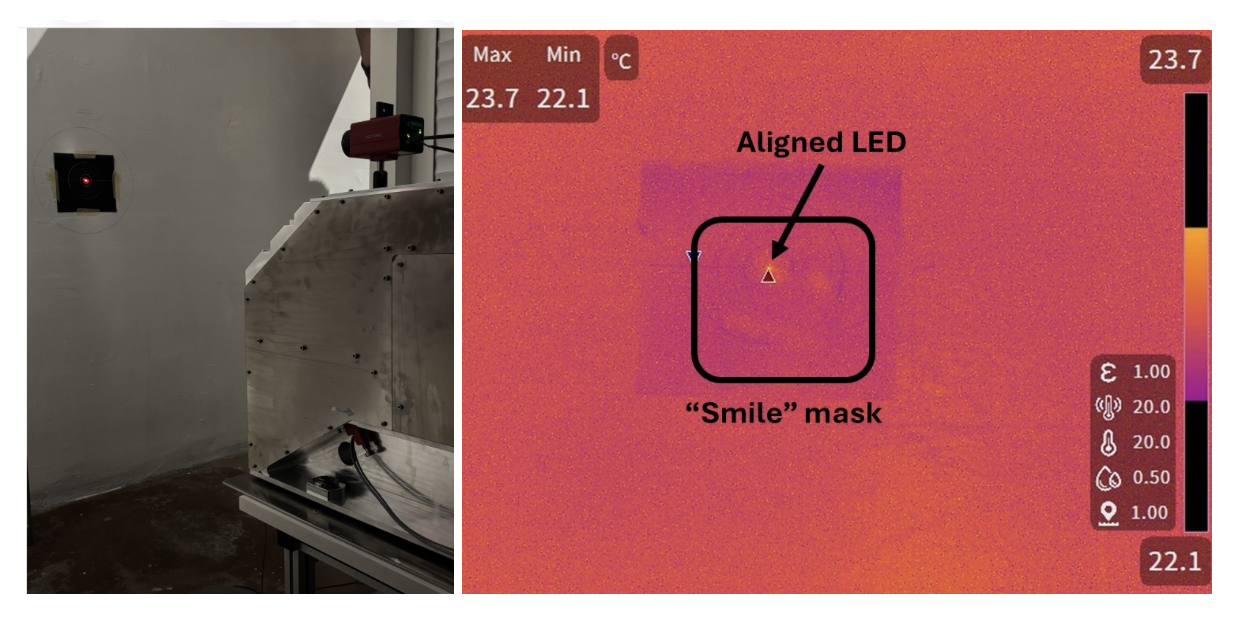
Tomorrow, we plan to complete the final cabling of the source and to align the thermal radiation to the red LED.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}