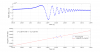
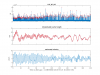
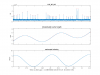
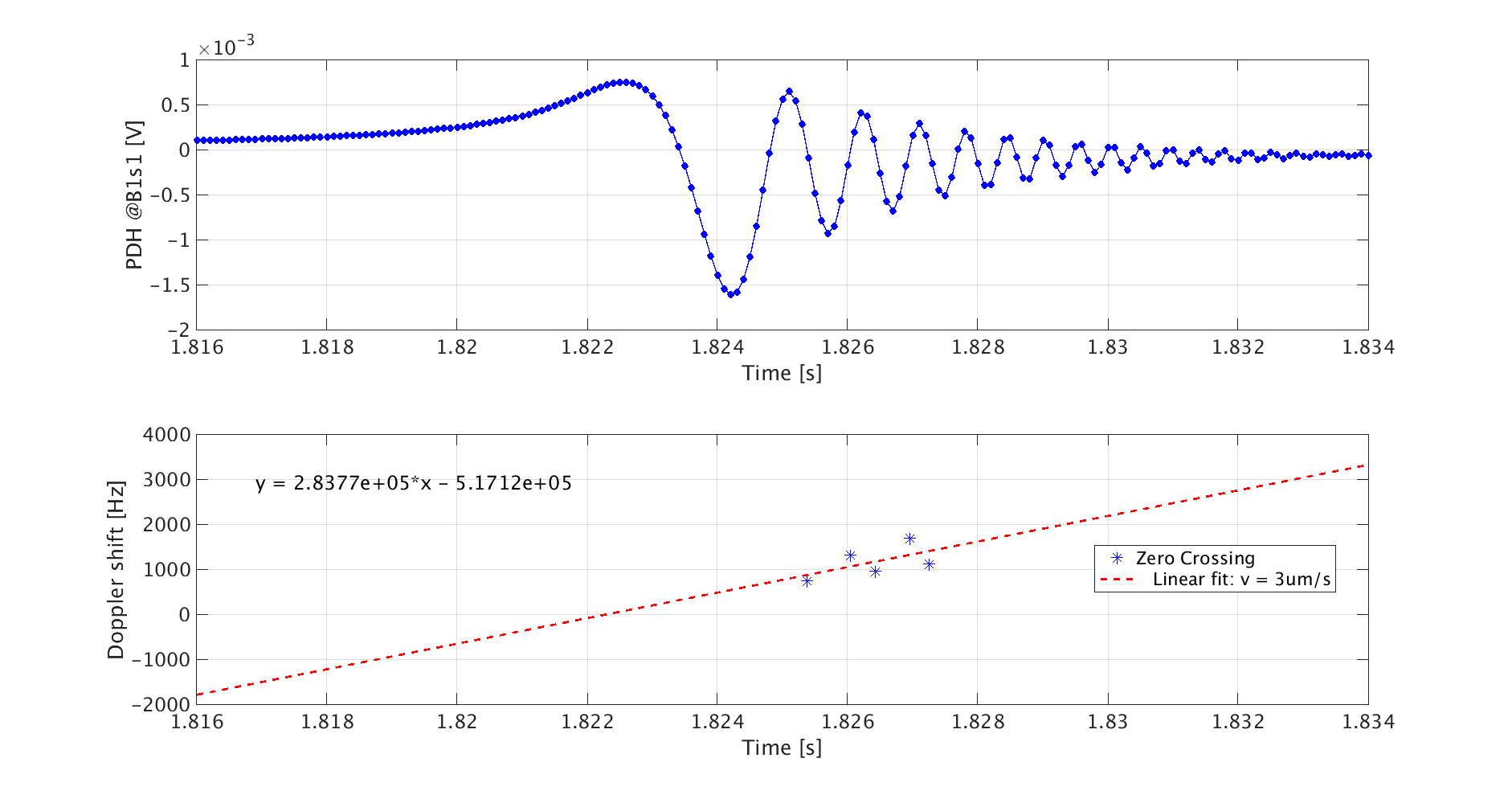
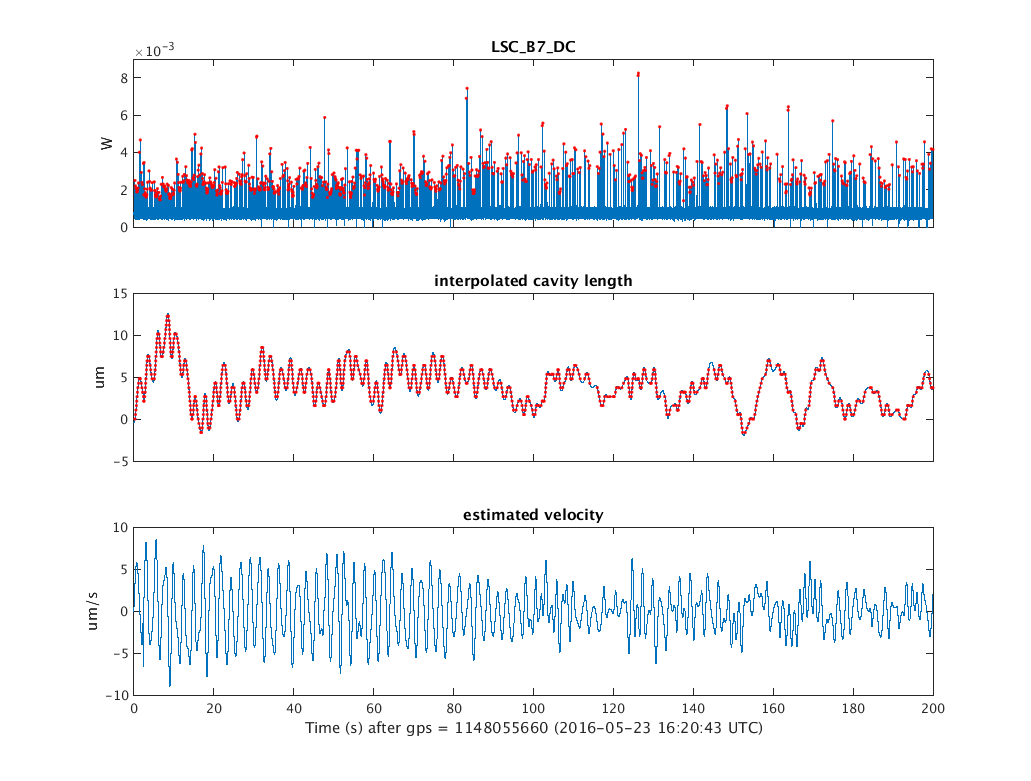
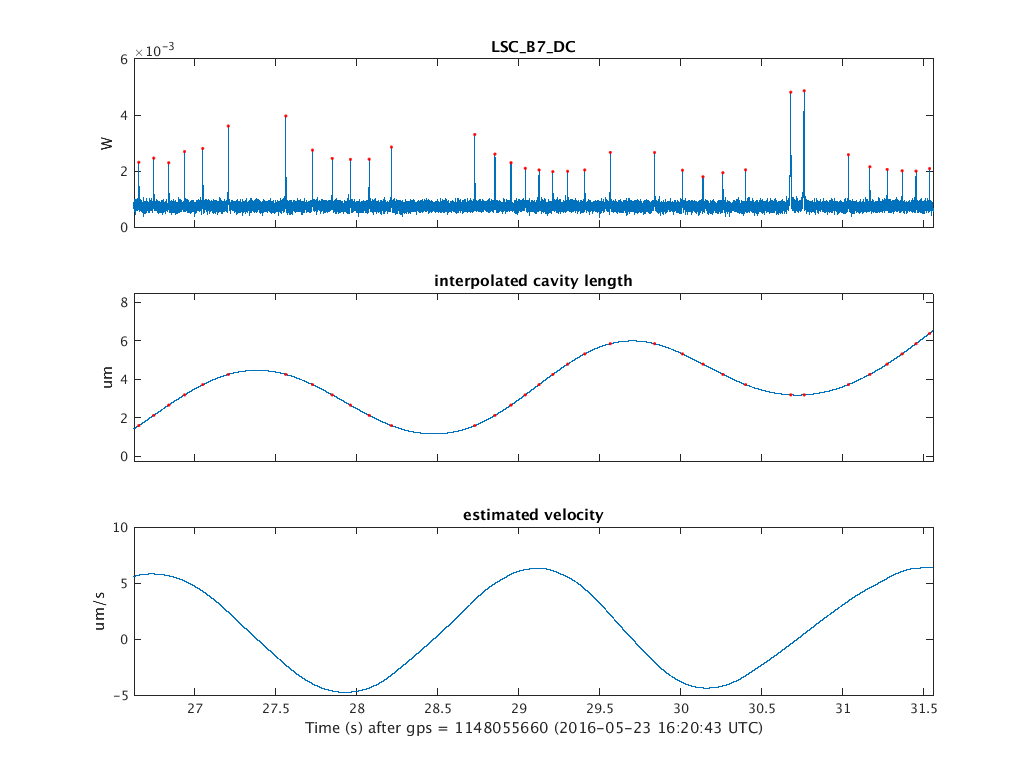
In order to slow down the cavity using Guided Locking, we need to calculate the velocity of the cavity in real time. In order to do that we use the value of the derivative of the normalized error signal (B1s1 / B7_DC) around a cavity resonance. To calibrate the error signal in meters/Watt, we took a data set of 200s starting from GPS:1148055660 and calculated the real velocity of the cavity following the ringing analysis in entry 33795 using the PDH signal (Rahkmanov PhD thesis pp. 38-39). We obtain the zero crossings of the PDH signal (with ringing), and we calculate the average frequency of the oscillations, plotting it as a function of time. From the slope, we can obtain the velocity. Figure 1 shows an example.
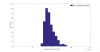
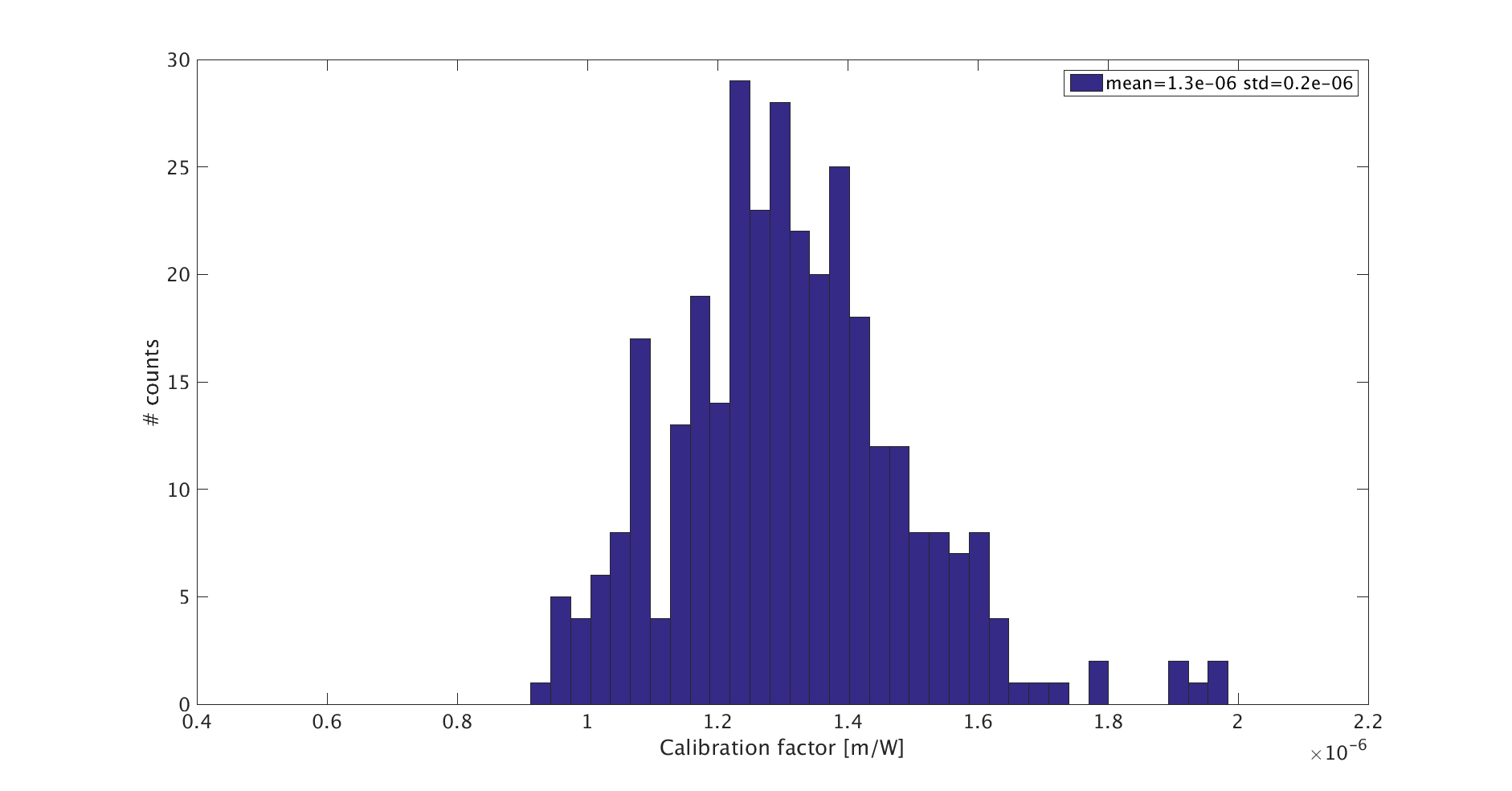
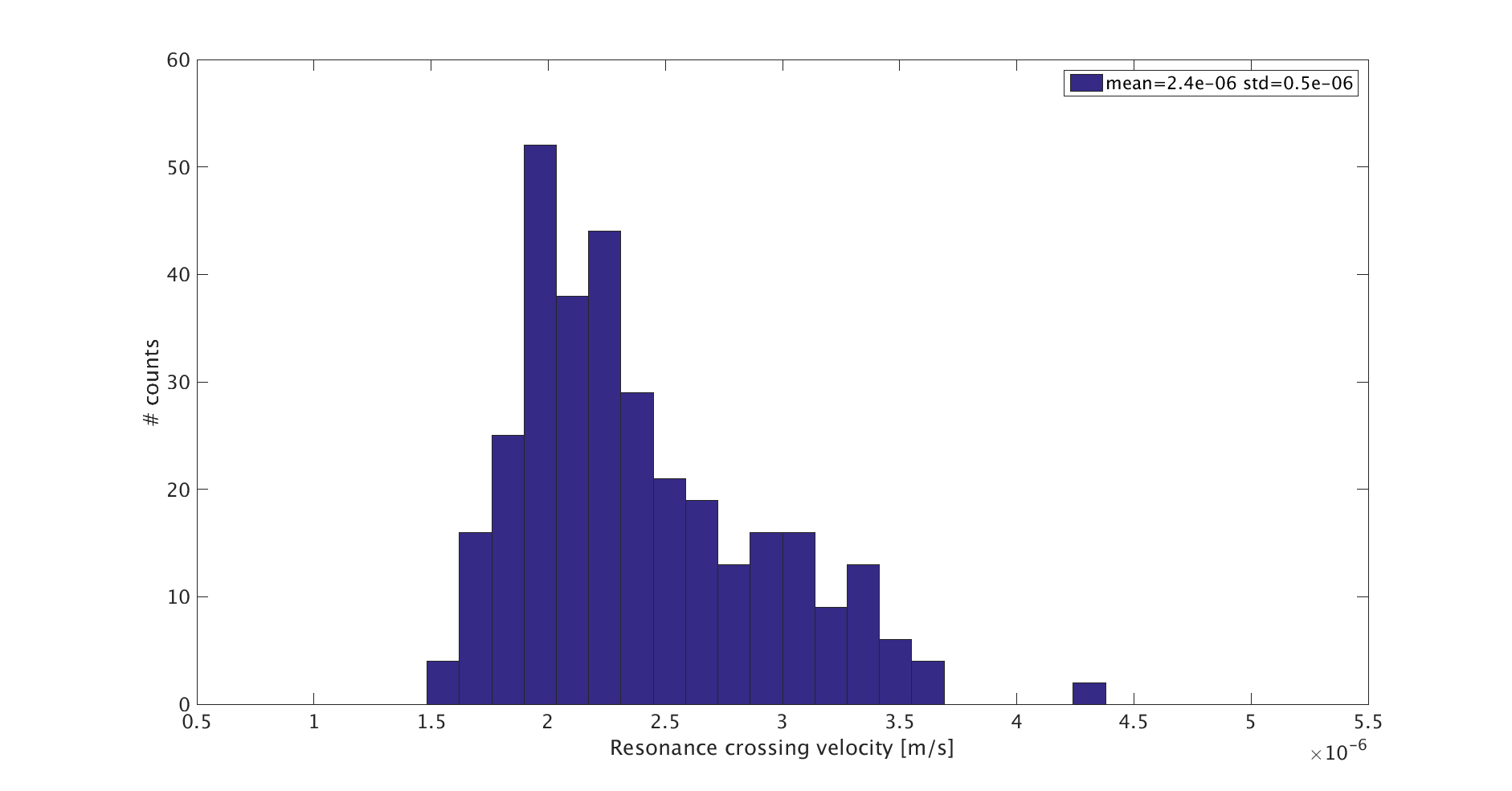
We repeated this process for the whole dataset, and for each peak, we calculated the calibration factor between the real velocity and the derivative channel used for the guided lock algorithm. FIgure 2 shows the histogram of the different analyzed peaks (336). The calibration factor obtained is (4.5+-1.2 (std))e-4 m/W.
Tomorrow morning we will use this calibration in the already-written guided lock script to determine the width of the actuation pulse that will slow the cavity velocity enough to lock.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}