Inside the tasks must be: NI,NE WI,WE,PR,SR,INJ,MC
=============================================================================================
After several problems, today a loop ty was closed using the F7->Mario actuators.
The system has a number of matters that have to be solved.
- given the present average position it touches inside, then we had to manage to find a small range of free oscillation dedicated to TF measurements and to control tests.
- we had to set the OL with a significant misalignment (20 mrad at least) with respect to the position provided after the integration with the suspension, then we struggled a bit to find a suitable range to operate it.
- the motors to rotate (ty, yaw) reached the end of run.
- the driving with the verical actuators (tz,tx) is far from being fully understood and just a very preliminary setup has been implemented
- the tests were performed with the air flow turned off (a necessary condition)
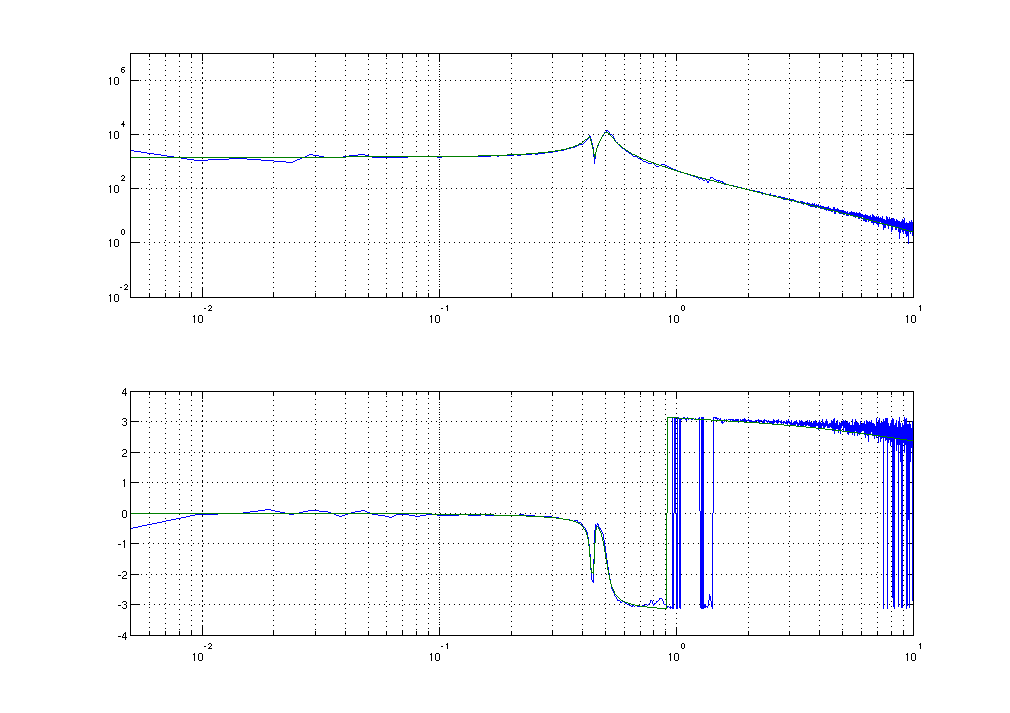
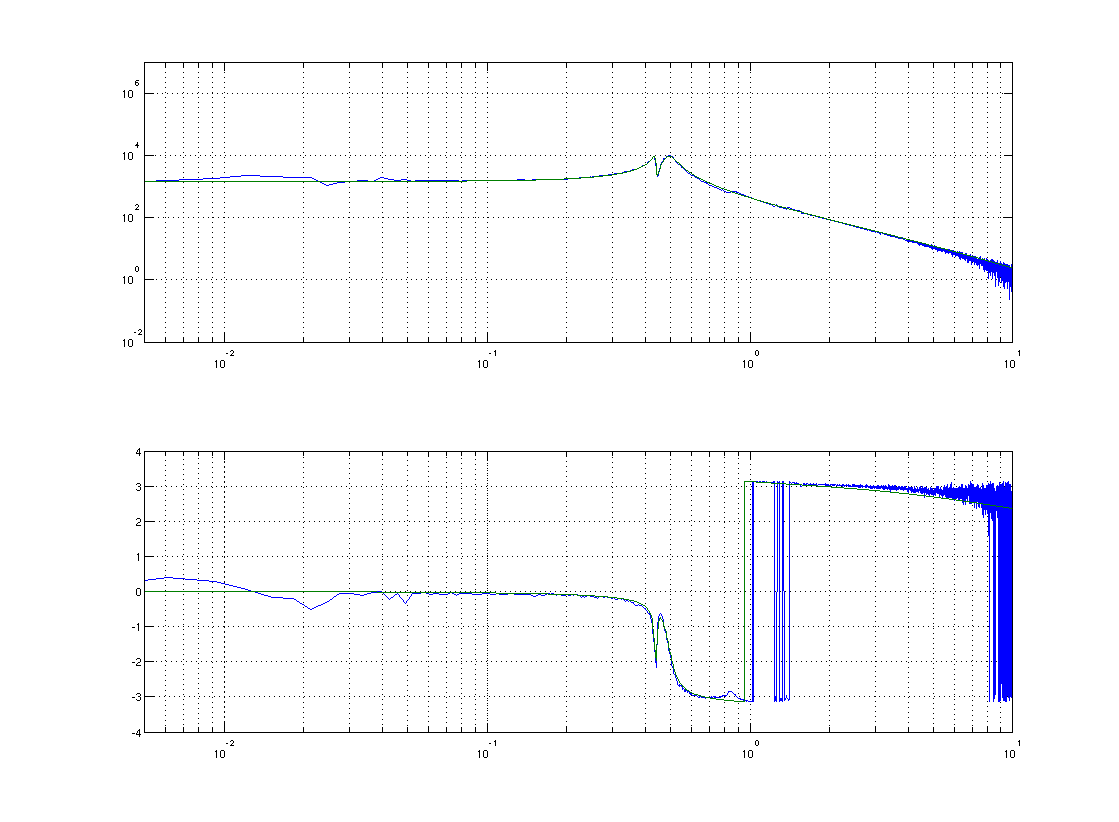
Today I measured for the TFs ty,ty,tz and preliminary controlled the ty.
- the OL monitoring the bench (PSD on the focal plane of a 200 mm lens): tx ty
- the OL monitoring the marionette (PSD on the focal plane of a 200 mm lens): tz
Note that, as usual, the DOFs are oriented along the MC so that the tx of the bench is the injected beam pitch.
TF data (UTC):
TY: 22/04/2014 ~ 09:20:00 + 45 min
TX: 22/04/2014 ~ 10.20:18 + 35 min
TZ: 22/04/2014 ~ 12.08:09 + 35 min
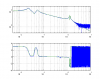
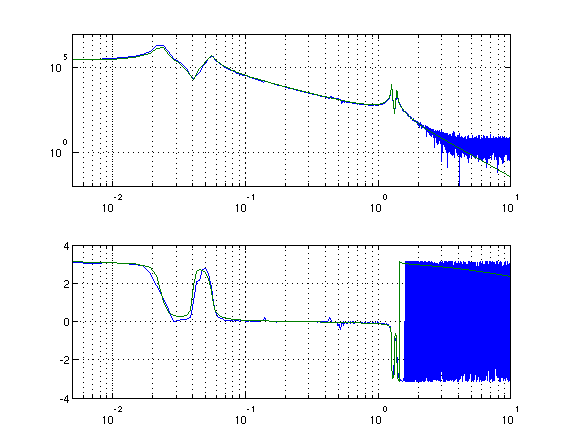
Pitch and Roll TFs are shown. They are fitted by eye, just to derive some consistent filter to control those DOFs.
The loops are sufficiently safe to be closed abruptly and all together, more sophisticated actions will be done once the IB will be properly aligned and certificated from the mechanical point of view. Preferably use a 5s ramp. There is still some air flow due to convection that affects at very LF the system (the bottom flange is open). The improvement of controls will be performed later on, in vacuum.
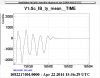
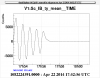
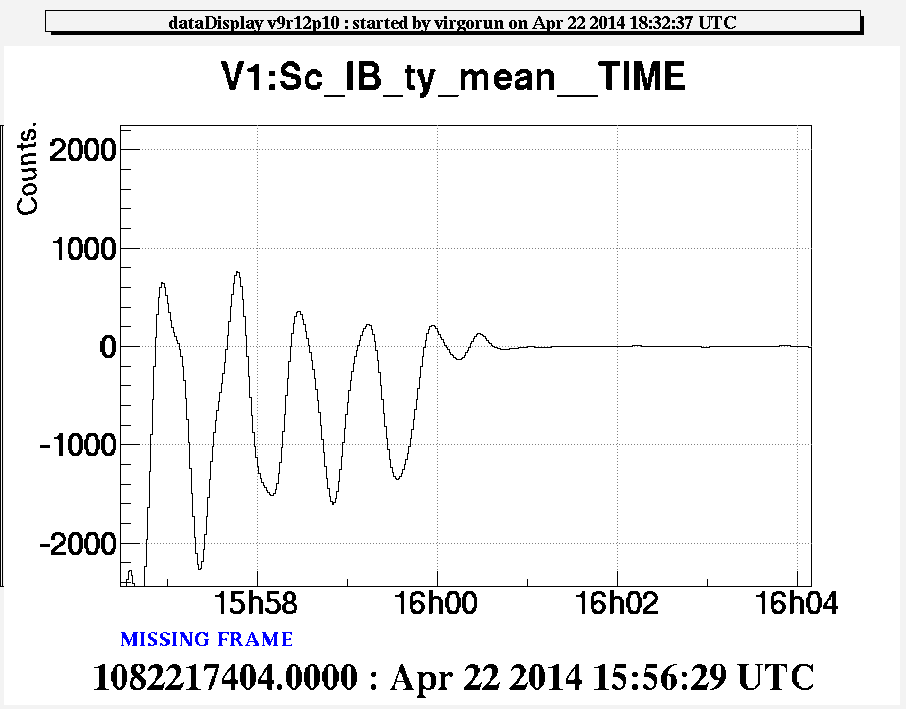
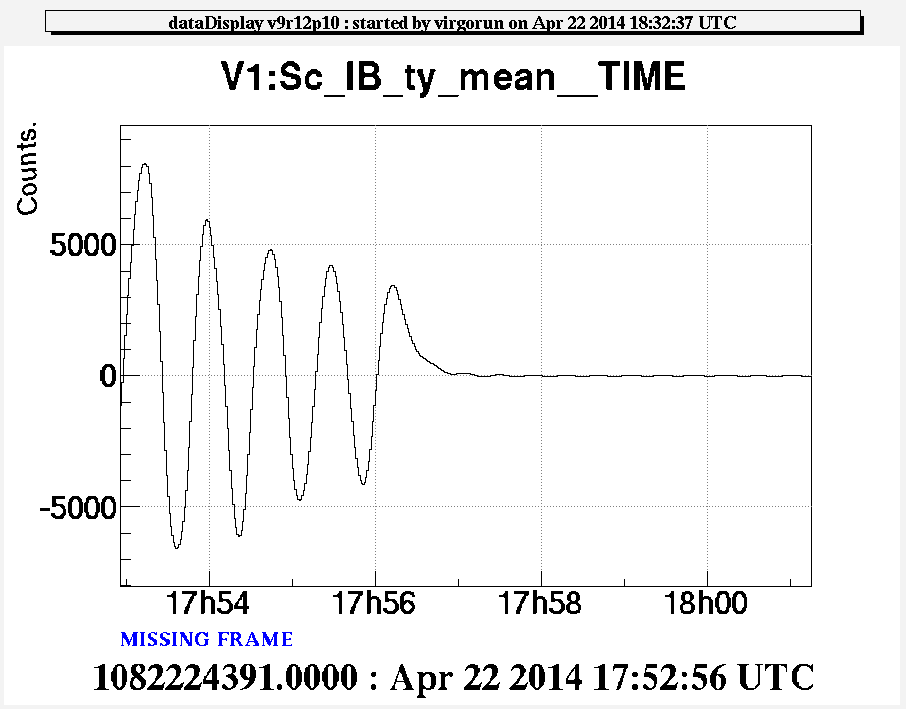
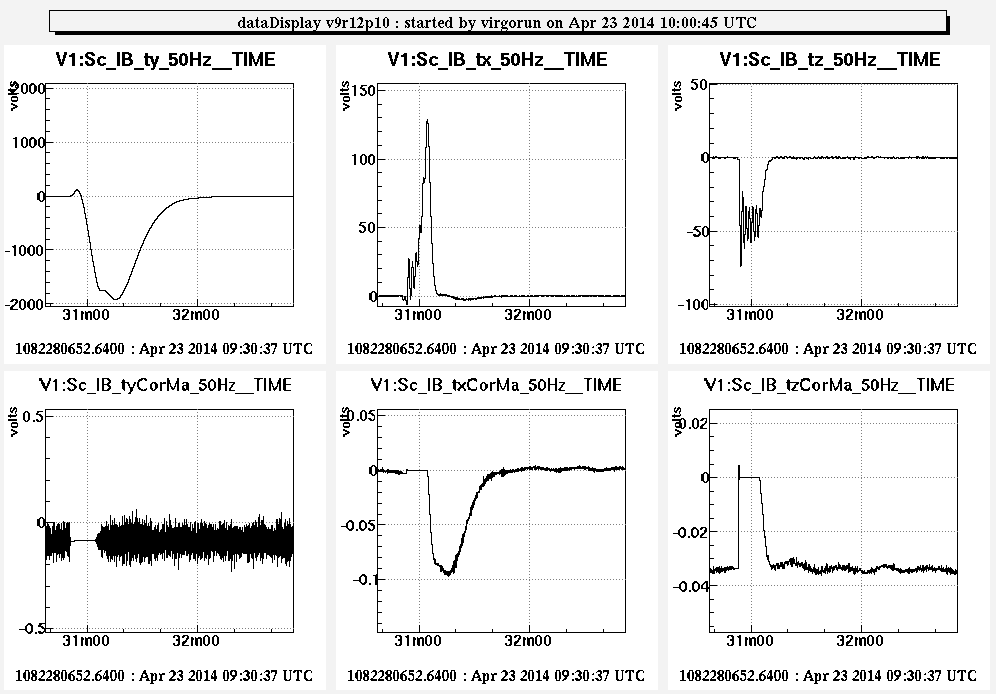
In the third plotset a loop closing is shown.
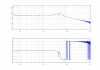
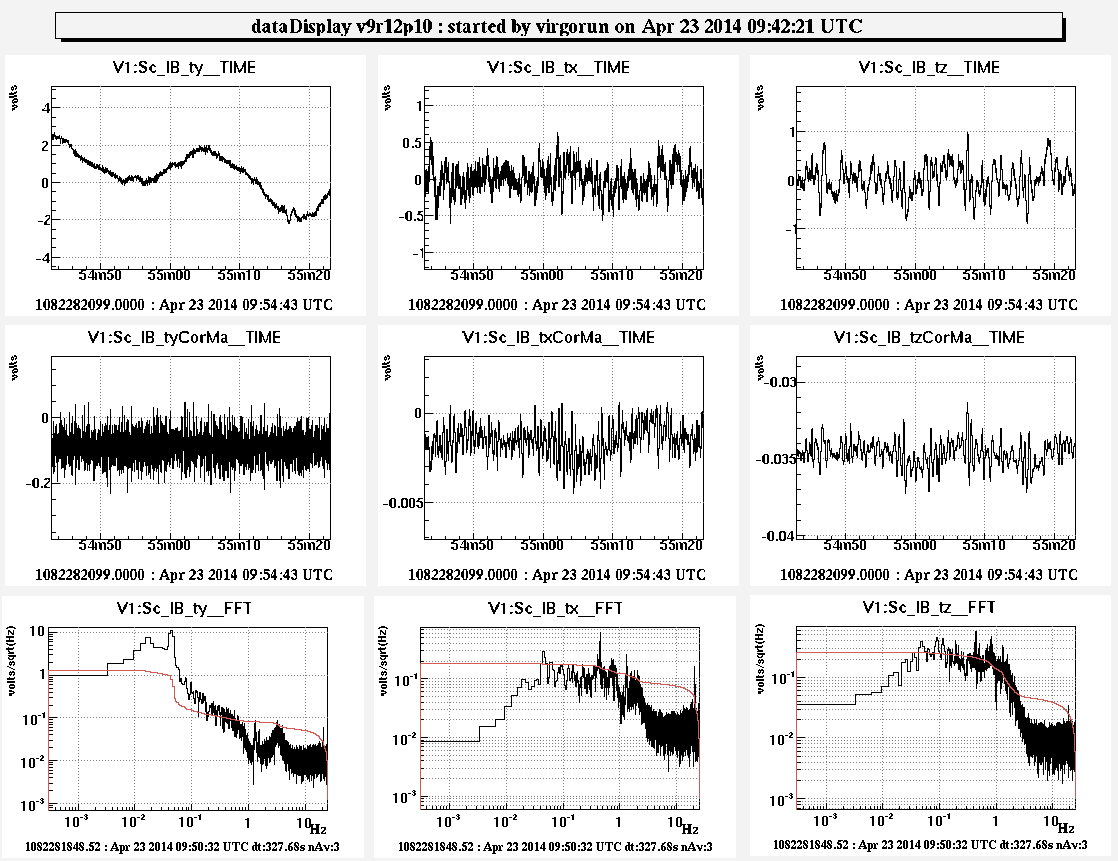
In the forth one the staus of the system concerning the angles.
During all the tests the suspension was under LVDT-only control and the benches of the OL meant to monitor tx and ty were exposed to standard air flow in the central area.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}