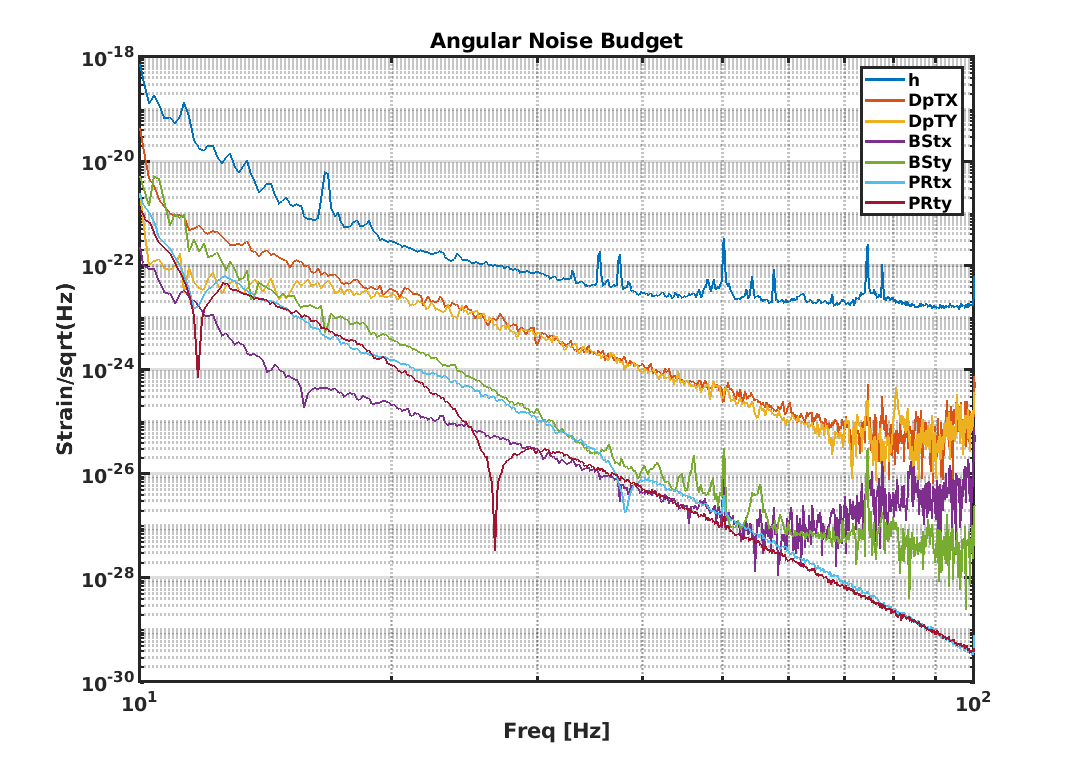
here is reported the partial noise budget of the angular loops using the measurements of last friday jan 16th. Specific injections has been made in order to both measure the coupling and obtain information to calibrate the several error signals. full budget needs to be performed.
useful GPS:
gpsDpTY=utc2gps(2026,1,16,11,03,30);durDpTY=300;
gpsDpTX=utc2gps(2026,1,16,11,13,10);durDpTX=300;
gpsPRTX=utc2gps(2026,1,16,12,00,10);durPRTX=300;
gpsPRTY=utc2gps(2026,1,16,12,11,50);durPRTY=300;
gpsBSTX=utc2gps(2026,1,16,13,09,10);durBSTX=300;
gpsBSTY=utc2gps(2026,1,16,13,33,00);durBSTY=300; % bpass1 driving inj for Coupling
gpsBSTY2=utc2gps(2026,1,16,13,42,20);durBSTY2=120; % bpass driving inj Plant OLTF
gpsCL=utc2gps(2026,1,16,12,38,20);durCL=300; % clean data
{kind=link}