In the latest days the etalon control has been working in a stable condition on both the arms, allowing a new attempt to fit the data with a model. I'm taking into account the period FEB17 14:00 - FEB23 9:00.
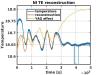
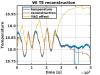
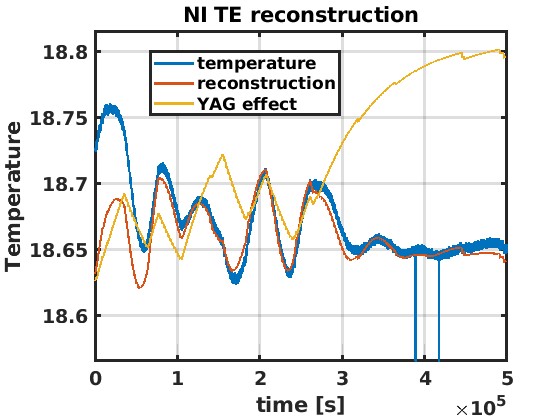
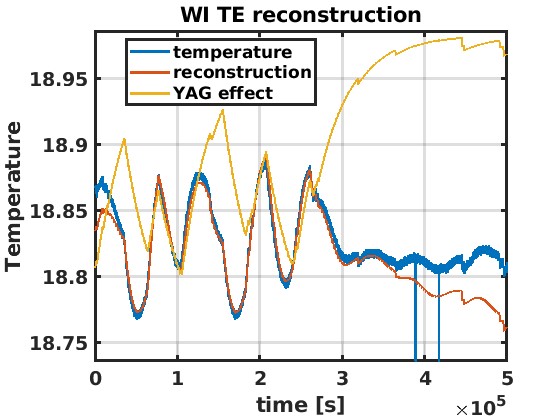
The reconstruction of the temperature measured by the in-loop temperature sensor, shown in fig 1 and fig 2, is based on two inputs and two model of response. One input is the correction applied by the loop: this is the square of the channel LSC_Etalon_NI/WI_HB_cmd. The signal is filtered using a model of the response of TM temperature to the power applied by the heating belt: two simple poles at 2.4e-6 Hz, gain 0.005 @ 0. The second input is the power in the arms, normalized in order to be 1 when the arm is locked in CARM NULL. The signals is filtered using model of the response of TM temperature to the power applied by the YAG: simple pole at 2.2e-6 Hz, gain 0.23 @ 0, for NI; simple pole at 4e-6Hz, gain 0.23 @ 0, for WI. The third component of the temperature trend is genereted by the environment, but this is unknown. Here we assume a constant variation and we fit a slope which optimizes the reconstruction. The parameters of the models used for this fit are slightly different from the ones used previoulsy, but the model of the loop does not change irs behaviour in a relevant way.
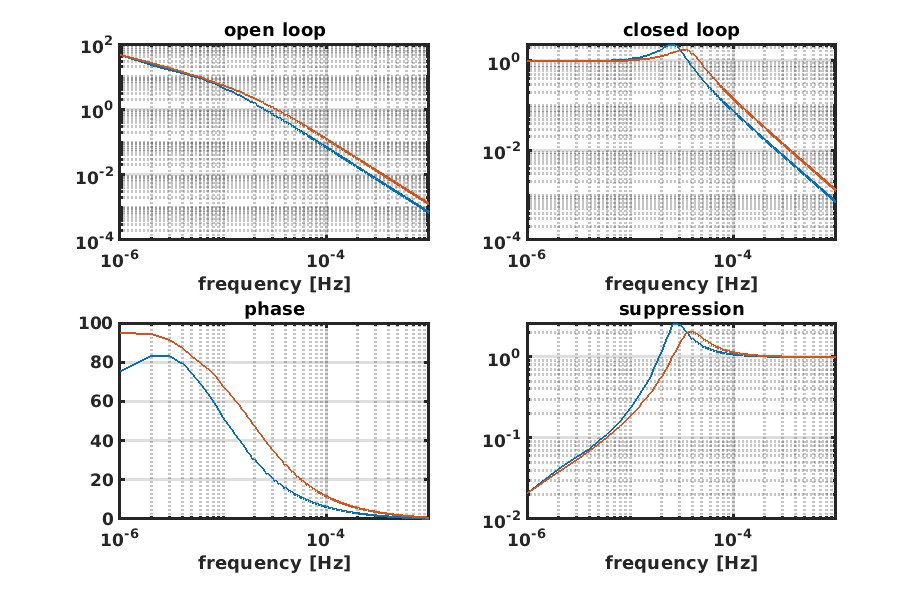
The plots show separately the effect of the YAG: it is clear the frequent long down time of the ITF was the main source of inaccuracy of the control. There is also the evidence that the loop is ineffective to reduce the temperature oscillation due to lock/unlock period lastig several hours, which was the typical condition we had last week. This behaviour of the control is foreseen by the loop model (fig 3): at the UGF, 25uHz (period 12 hours), the fase margin is low and the effect of the loop is an amplification of the noise by more than a factor of 2.
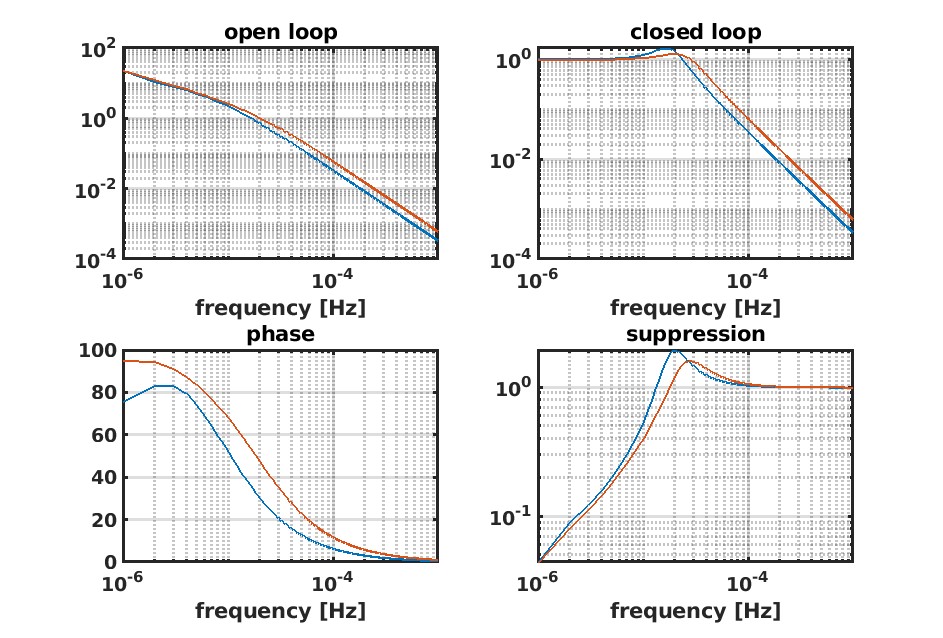
The phase margin is limited by the presence in the controller of a pole at 10 uHz. When the controlled was changed from as simple integrator to a more complex design, a safe choice in terms of roll-off was done, having no idea about the possible impact of an increased high frequency component in the correction signal. I think we should try to move upwards the pole. In fig 3, we see the effect in the phase and the suppression if the pole is set at 20 uHz: the overshoot is reduced and moved to higher frequency, where the amplitude of temperature oscillation due to lock/unlock would be lower (shorter period means less time to accumulate temperature variation). The new filter has a gain 4000 @ 1Hz, instead of 2200.


{kind=link}
{kind=link}
{kind=link}
{kind=link}