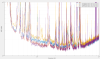
I'm trying, as usual, to do a personal decomposition of the noise curve. I start putting some known components, which should be not far from the ones used in Michal's budget. I also put a manual copy of many large structures visible in the noise above the floor. Then I add a few parametric curves and I run an automatic search of the best parameters allowing a good fit of the sensitivity with those curves.
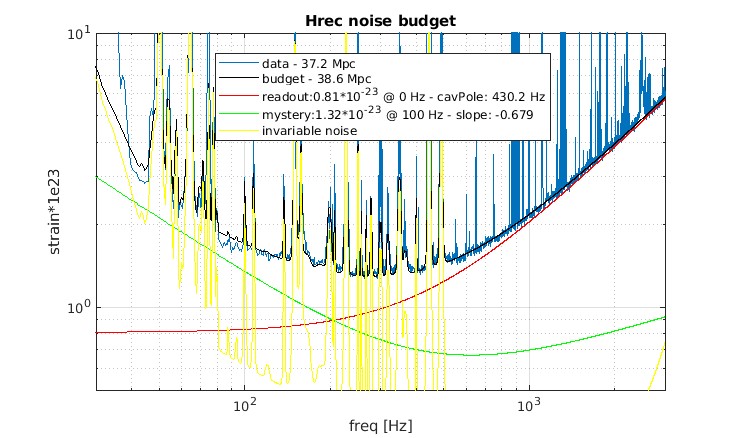
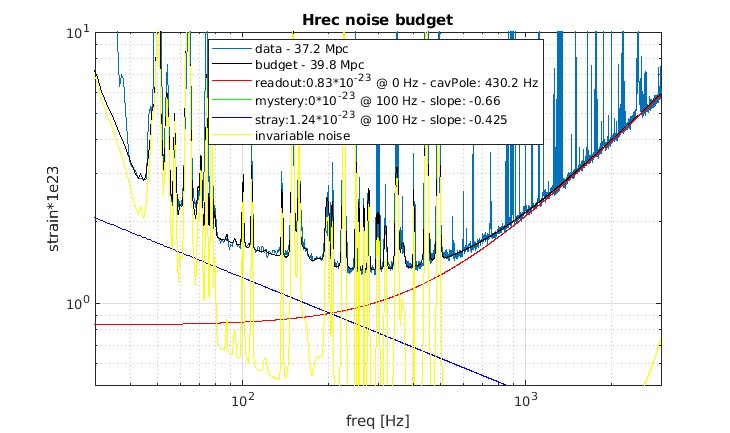
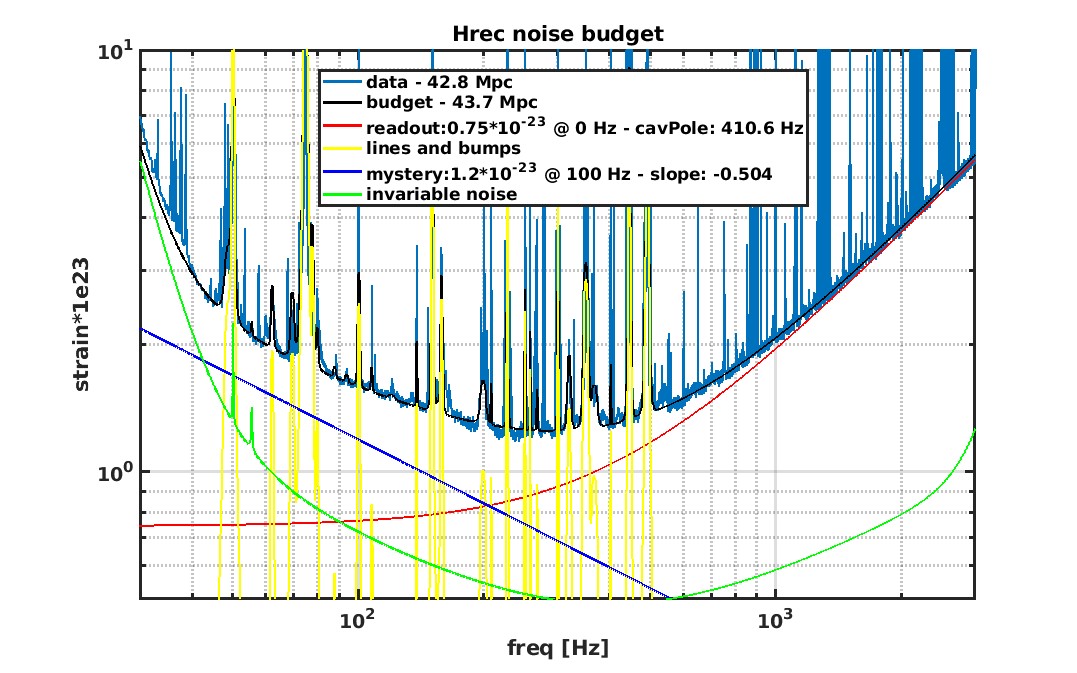
I did an attempt on the best data found yesterday (gps 1452475518, dur 800 s, 37.5 Mpc, DCP 430 Hz). The additional curves are:
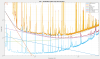
- a constant in DARM, multiplied by a zero at DCP, to match the calibrated shape of Hrec - this is indicated as 'readout noise'
- a curve with a constant slope in DARM, multiplied by a zero at DCP - this is indicated as 'mystery noise'.
The slope is used as a parameter of the search together with the amplitude of the two curves.
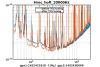
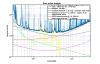
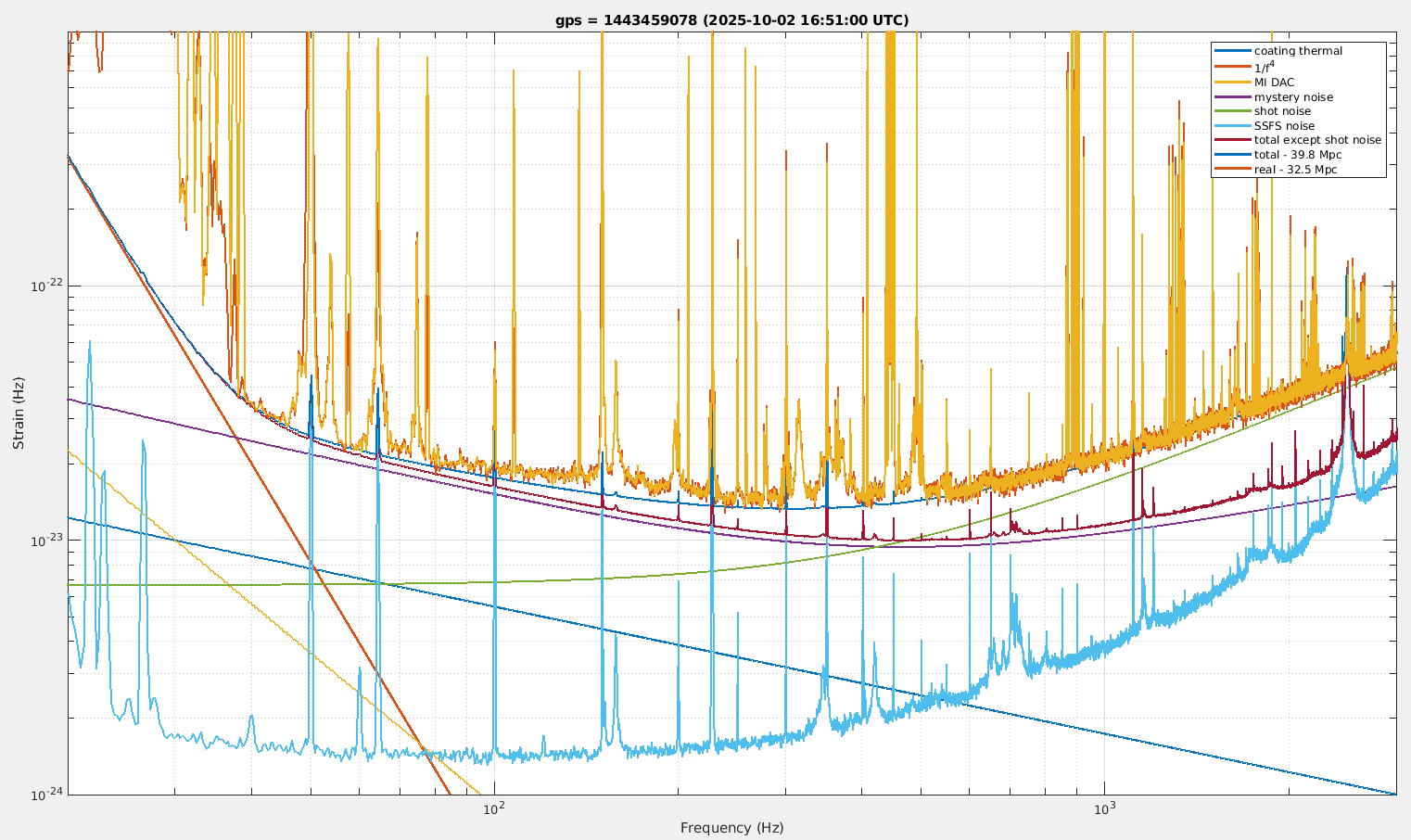
The result, shown in fig 1, gives an astimation of the slope -0.679, very close to first estimation of 2/3. Unfortunately the fit clearly overestimates the noise around 90 Hz and 45 Hz, saying that the slope could be lower. In that case, the quality of the fit become worse at higher frequency, but there is no reason to rely too much on the method and conclude that no constant slope can reproduce the mistery noise.
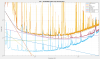
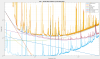
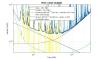
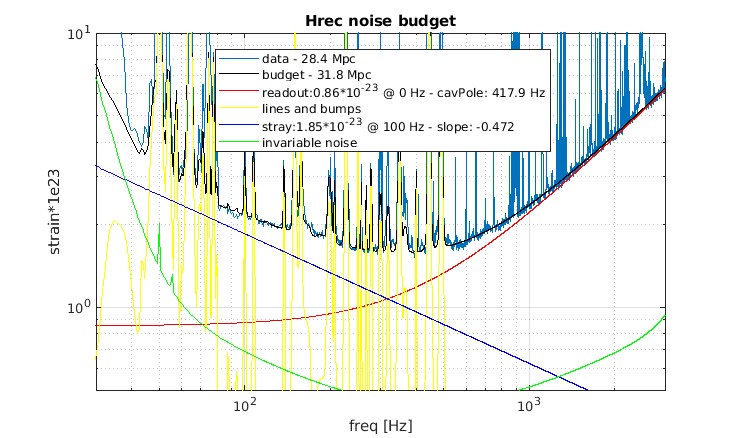
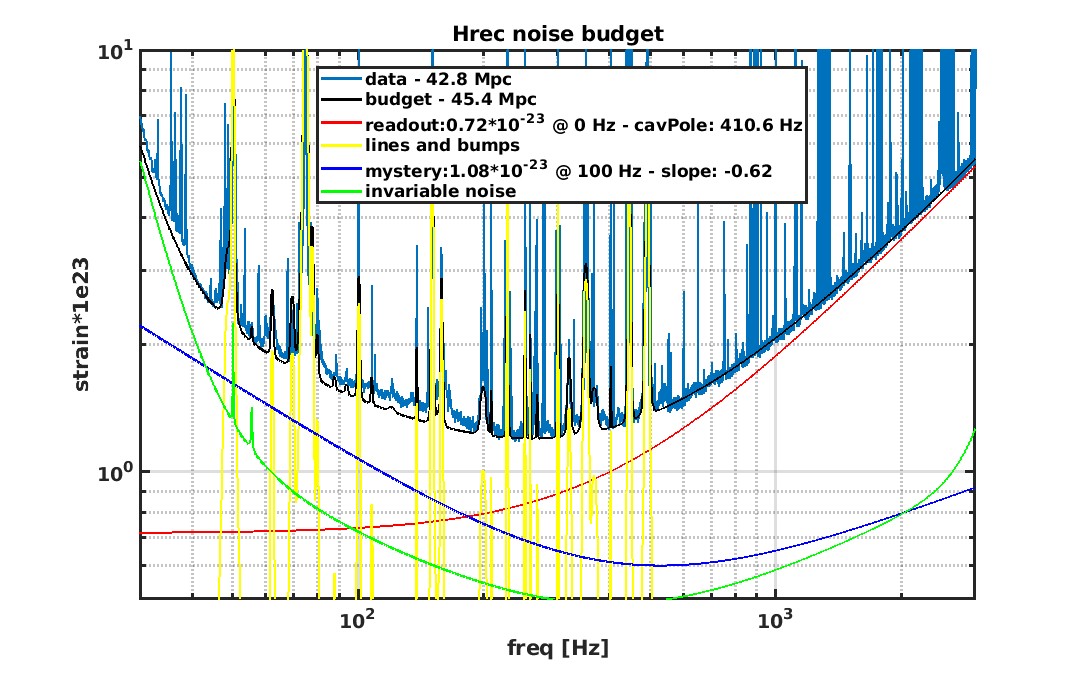
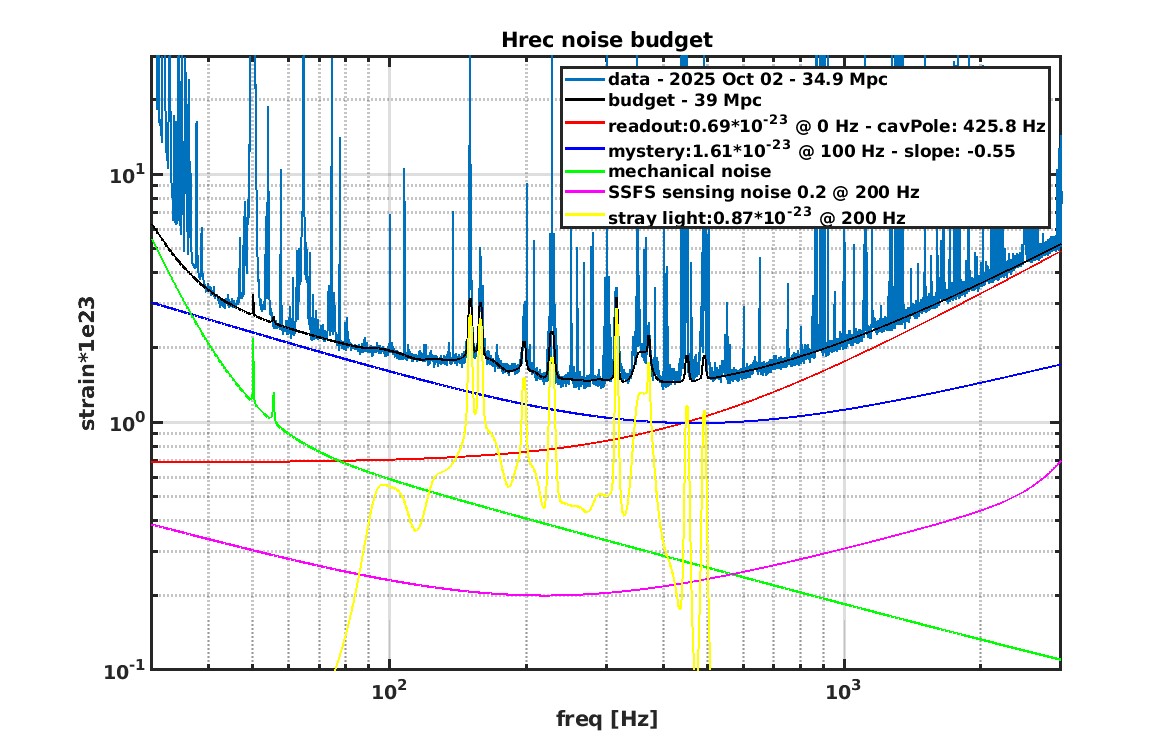
Anyway, I tryed a different assumption: a constant slope in Hrec. I know that this is a strange assumption, because an optical noise should have a simple shape in DARM and the zero due to DARM response should be applied in any case. My assumption is done for its simplicity and correspond to the case of a noise with constant slope at low frequency and some cut-off in the frequency region of the DCP.
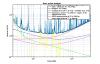
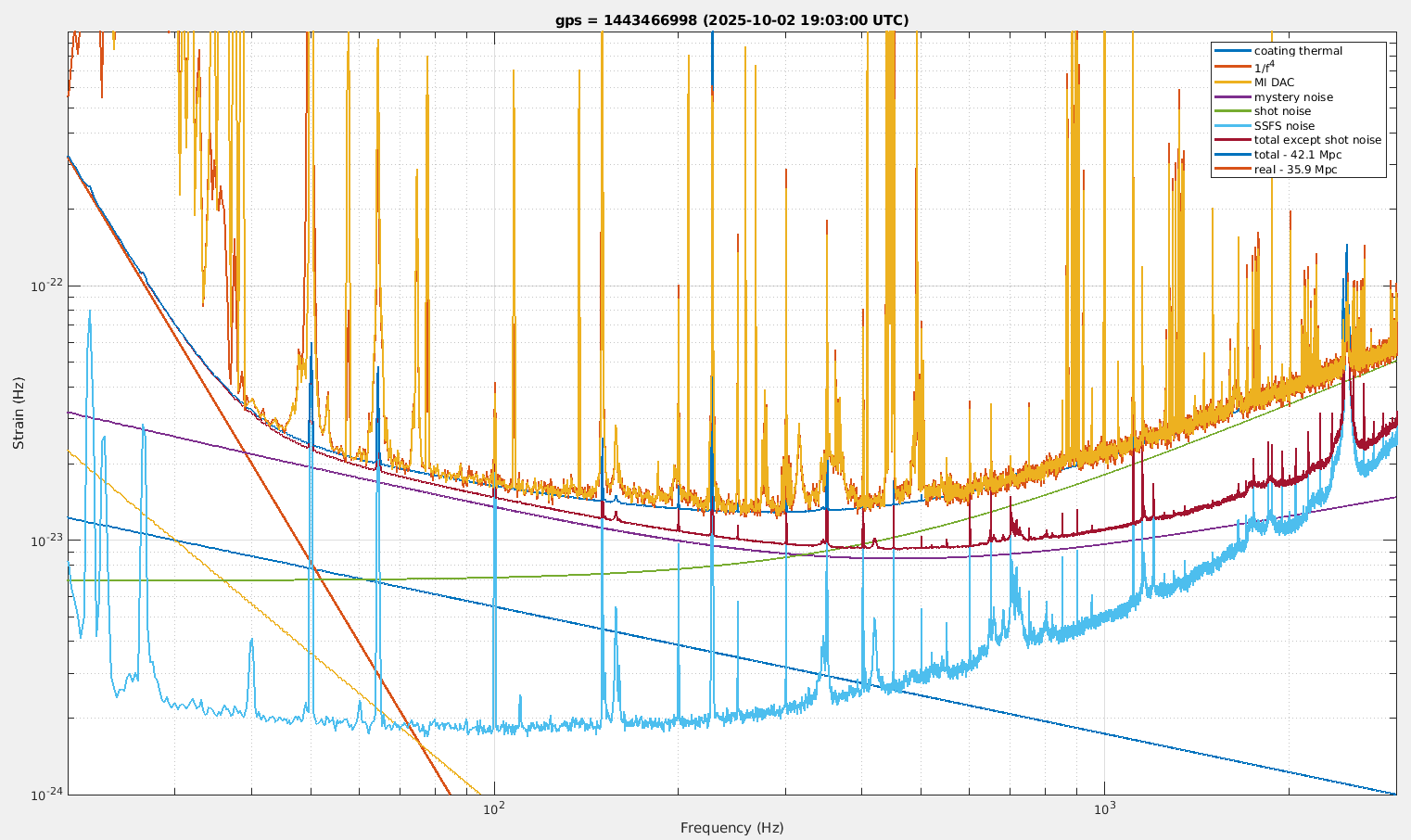
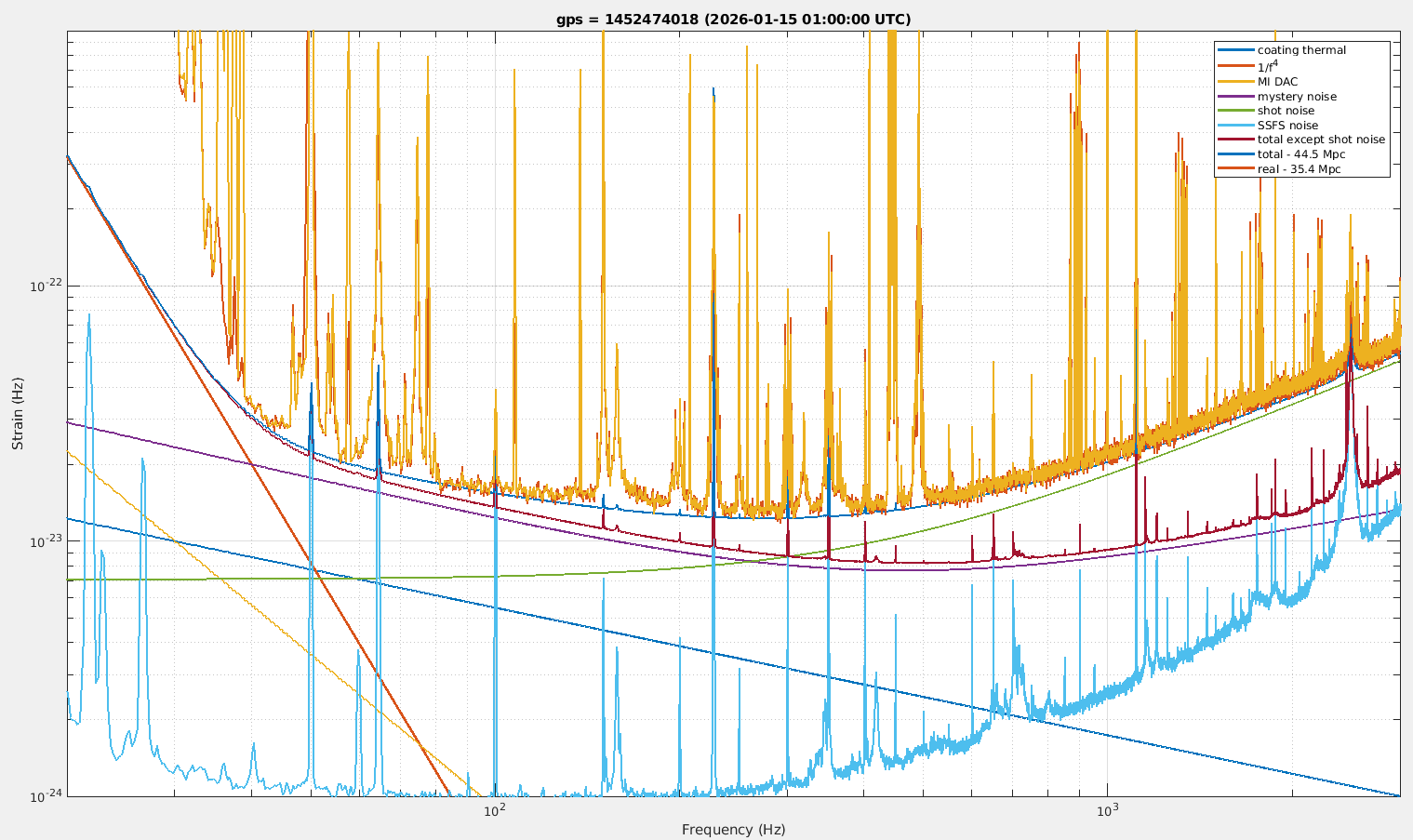
The result is shown in fig 2: it gives an estimation of slope -0.425 and it is very satisfying everywhere. It is so much satisfying also because I built the bumps and lines starting from this fit, so I arbitrarily covered some discrepancies, but I did not make any relevant change of the floor. The parameter search has been done keeping in the game also a mystery noise component with fixed slope 2/3: the result for its best amplitude has been 0. In the plot, the new curve is called 'stray' just to distinguish it from 'mystery'; the name is not a hint concerning its possible nature.
The second fit forces the readout noise to be a bit larger that in the first fit. If there is a precise indipendent estimation of the readout noise, which is lower than the sensitivity curve, the second model of excess noise cannot fill the gap and should be discarded. But there is also the possibility that the gap is due to another mystery noise, coming from a different source.
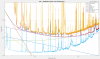
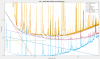
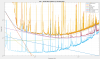
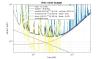
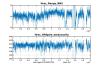
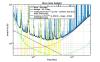
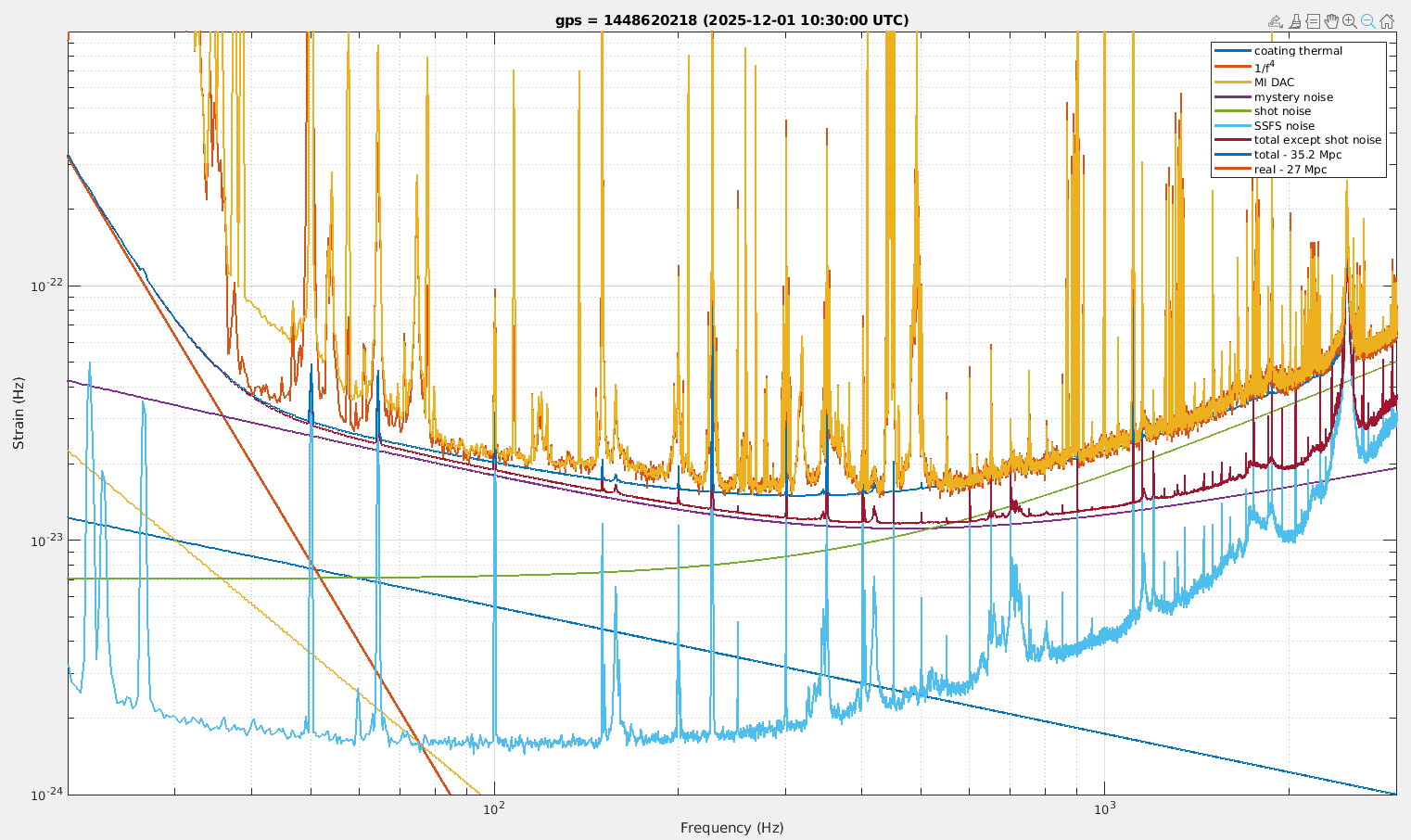
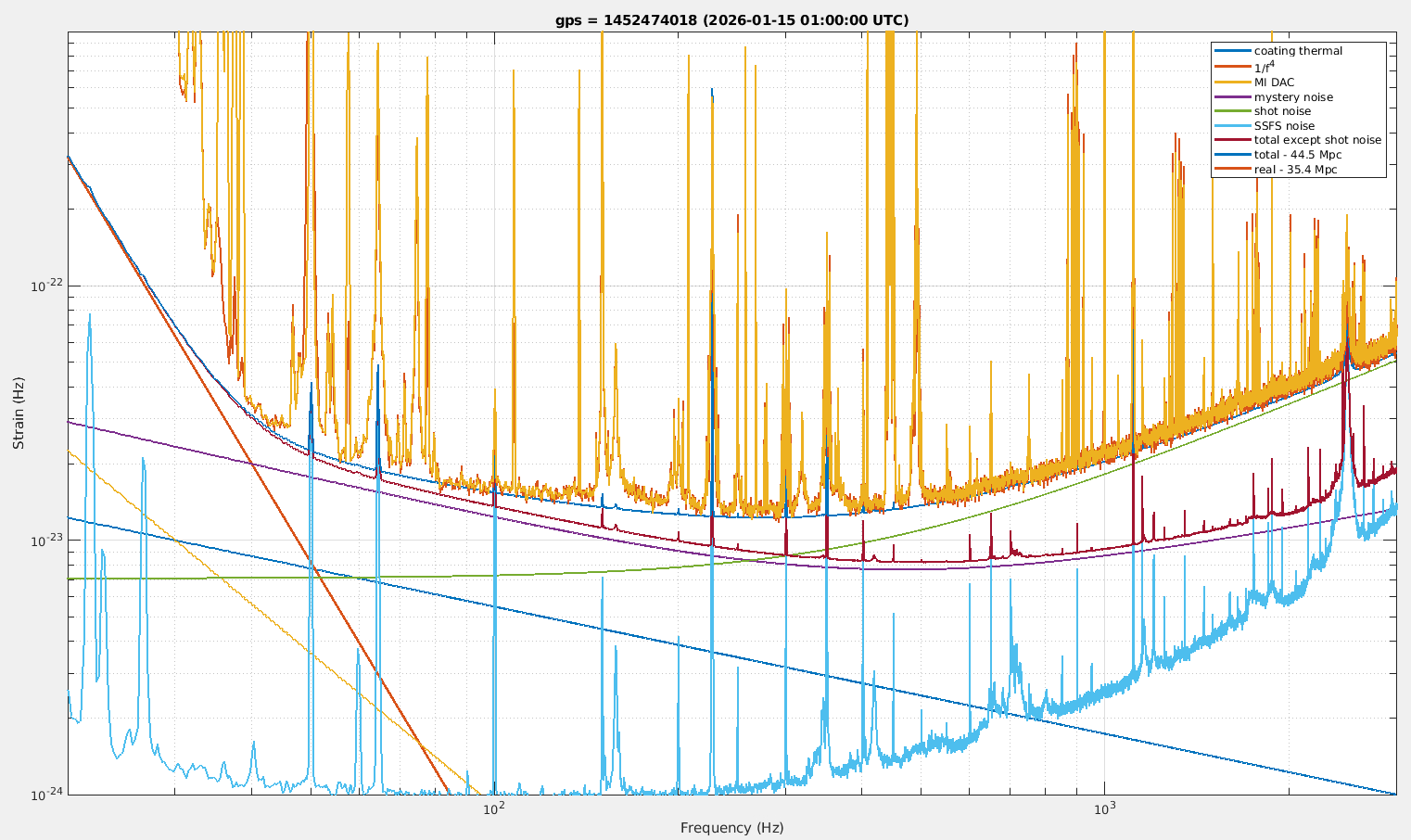
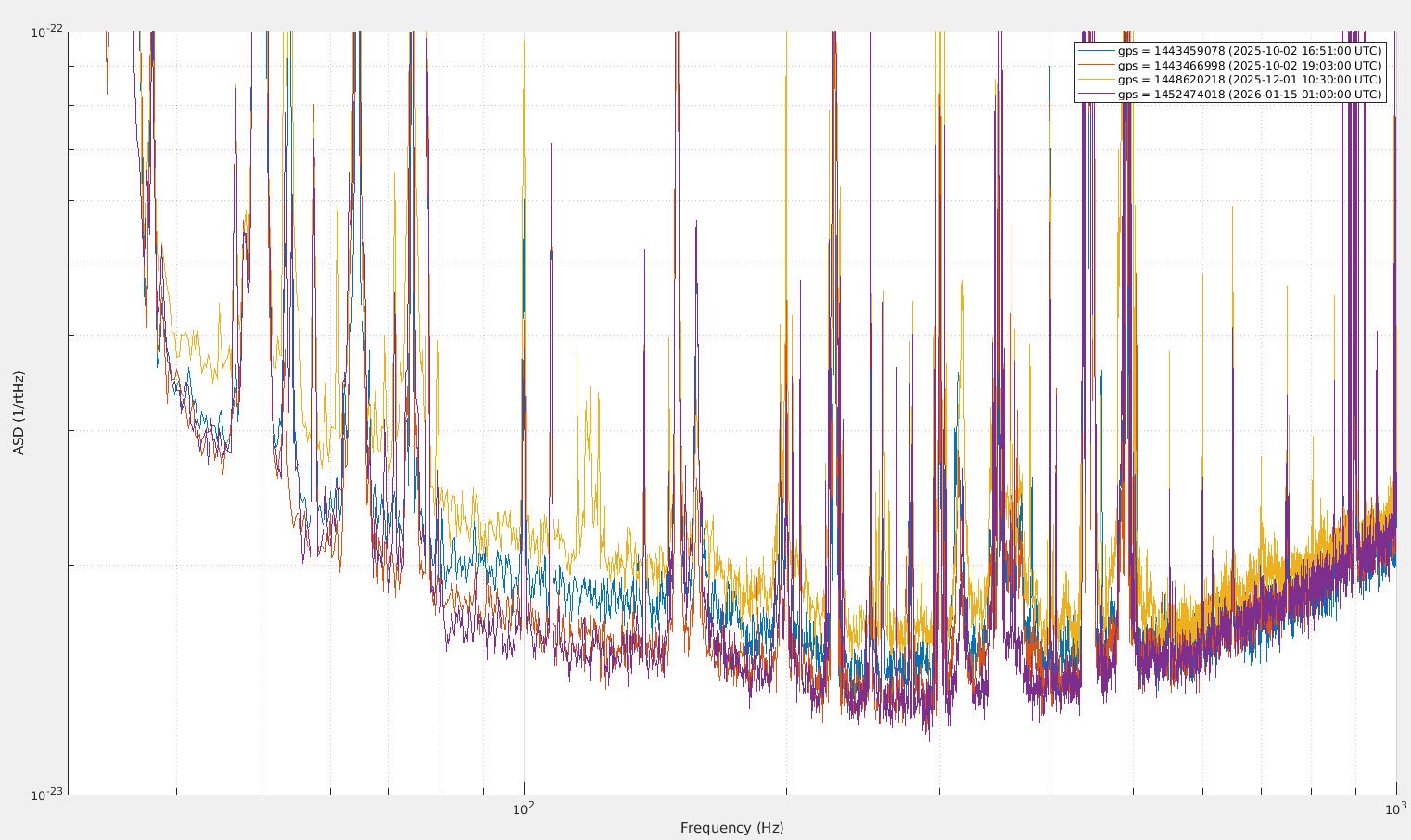
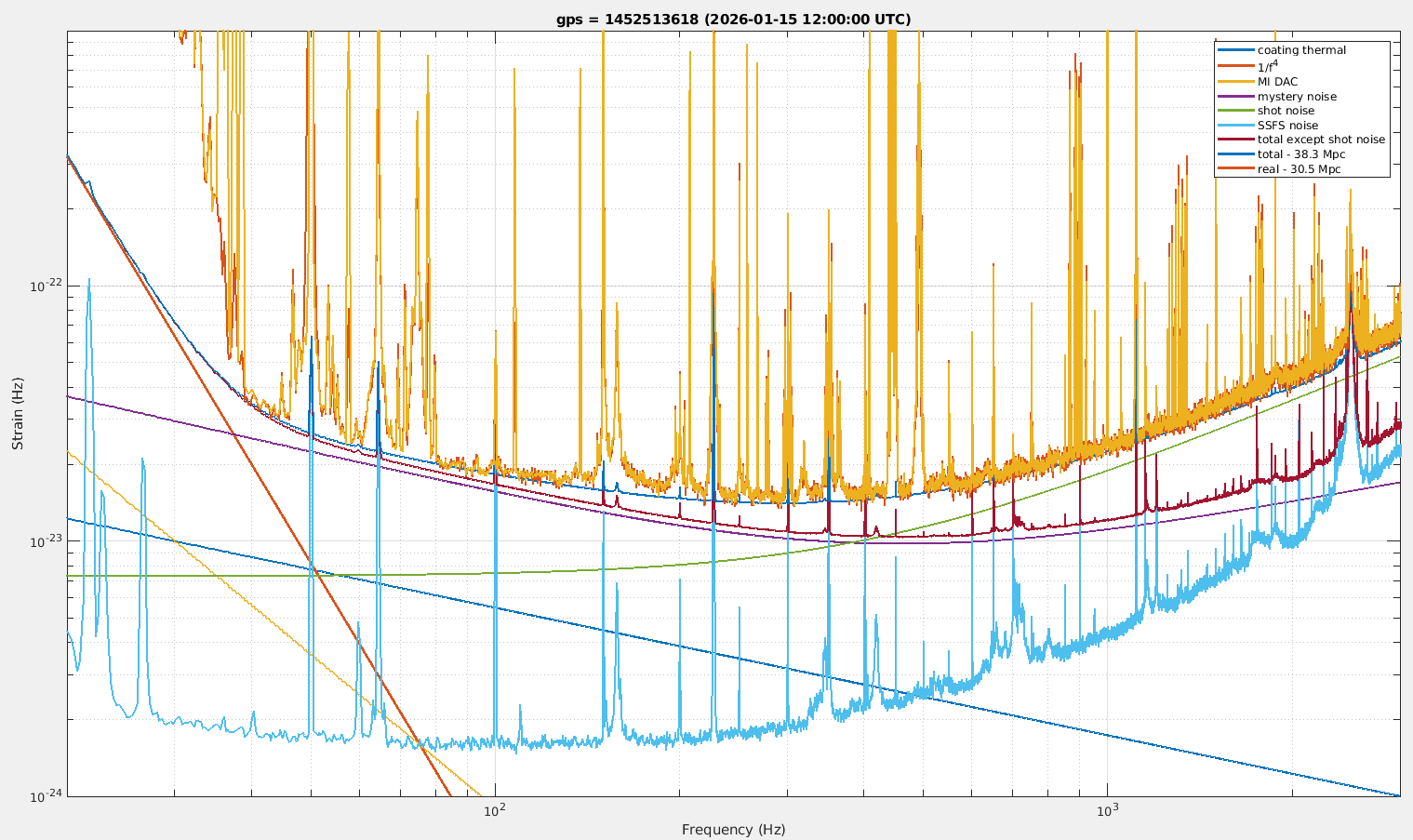
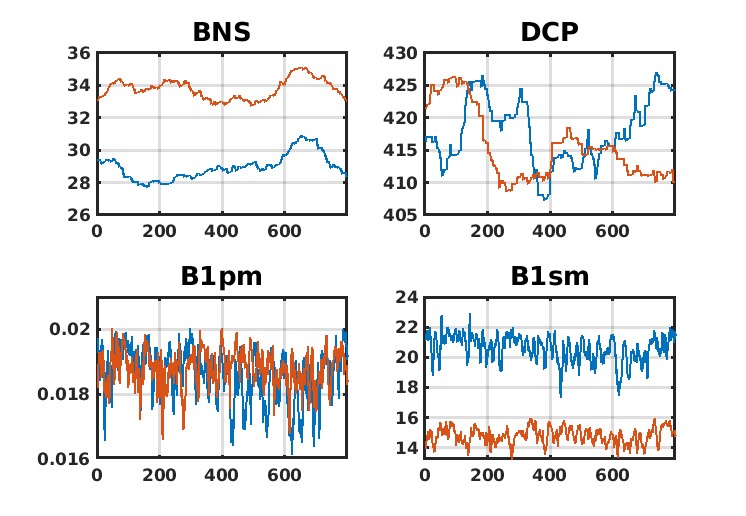
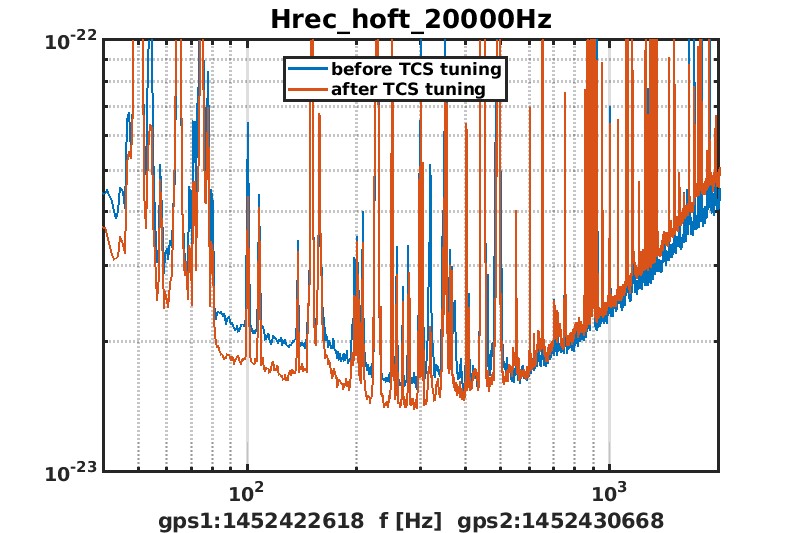
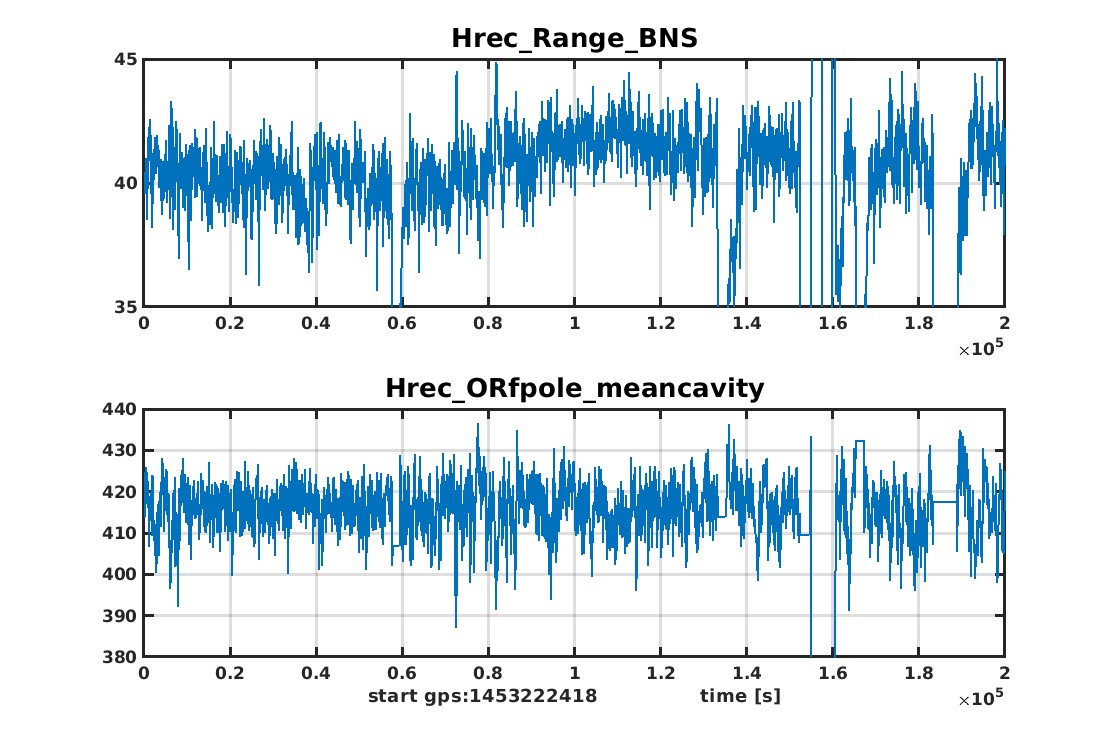
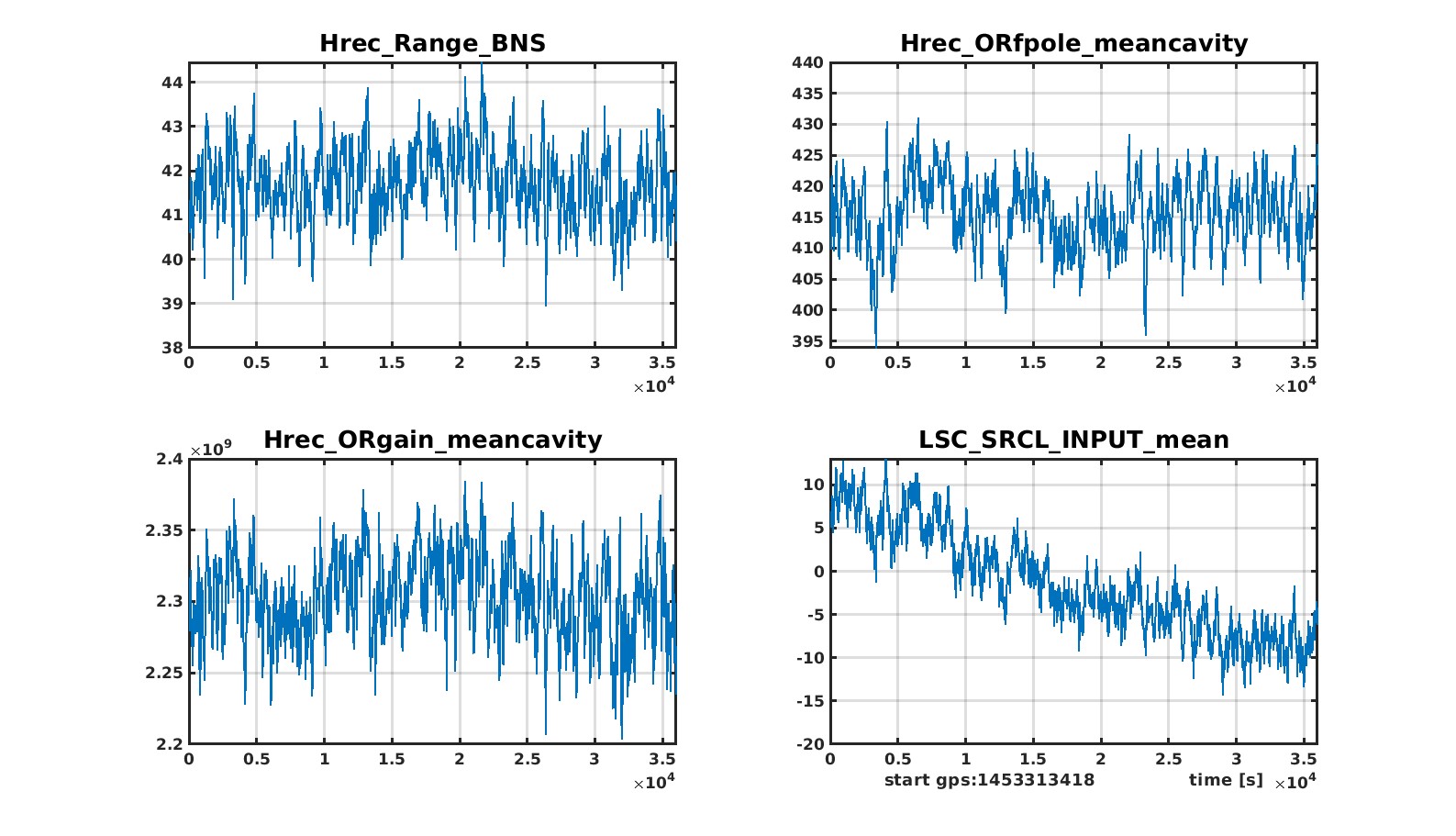
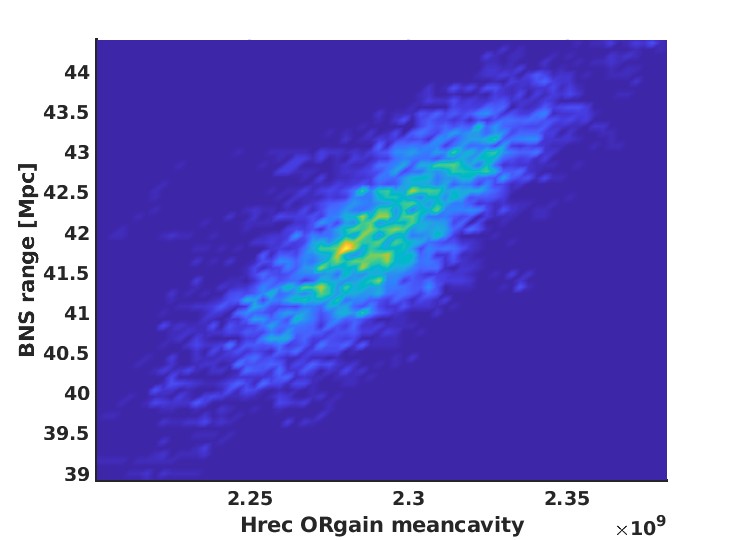
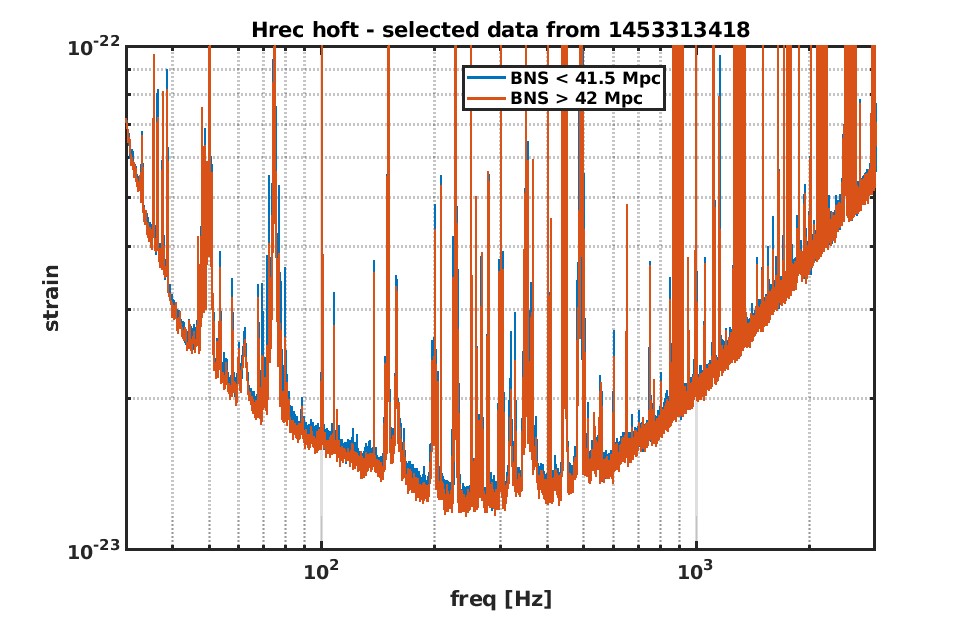
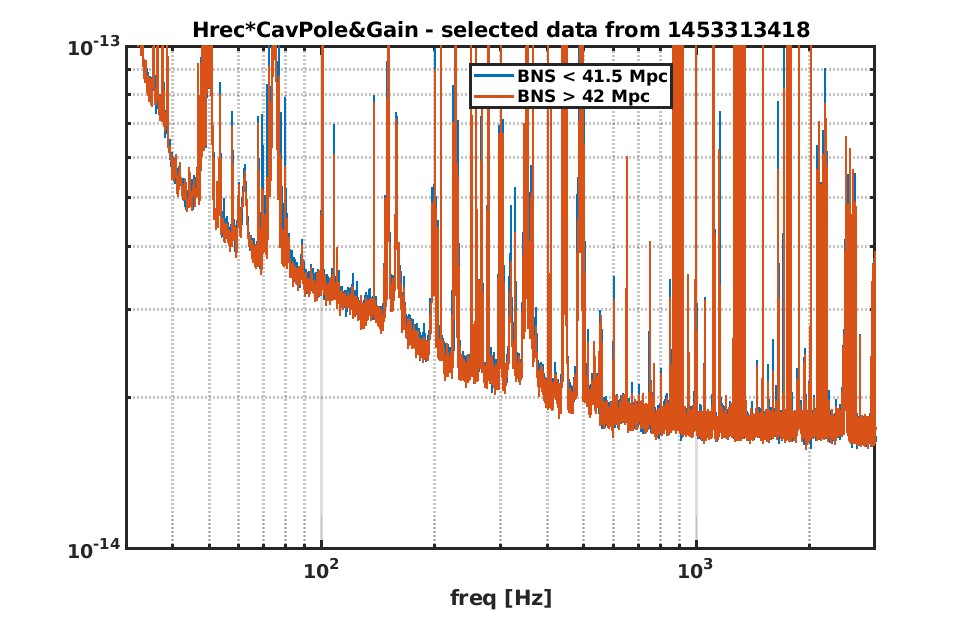
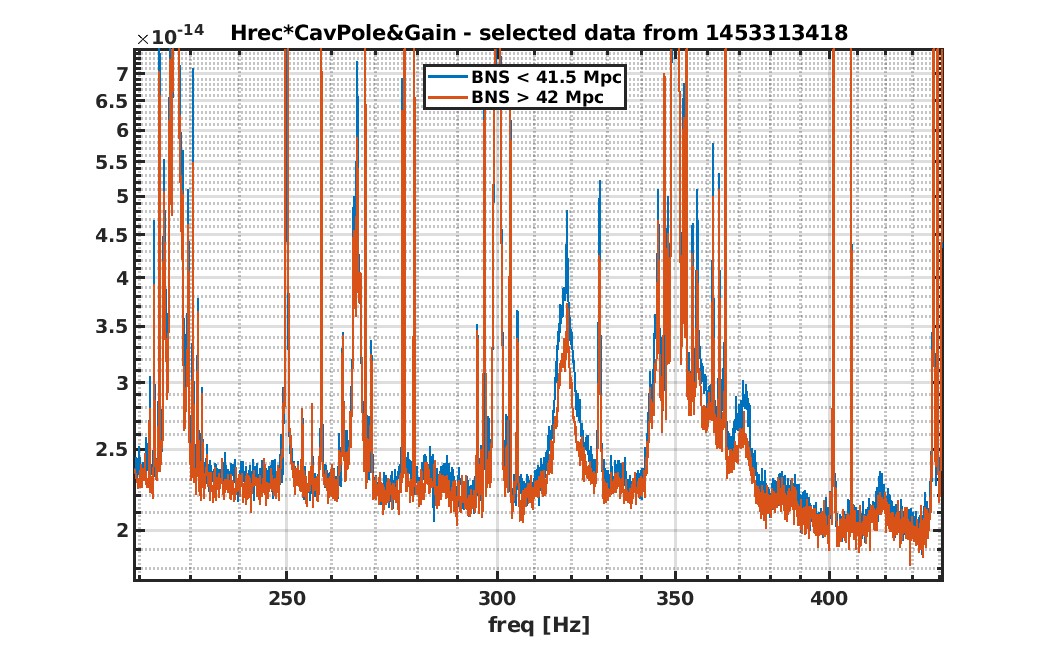
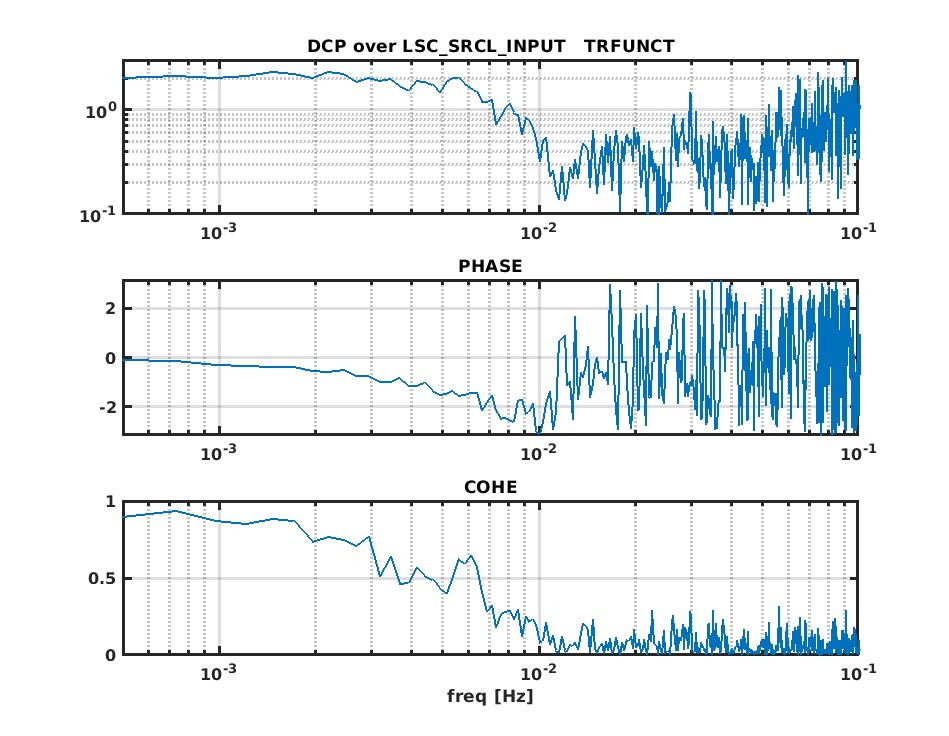
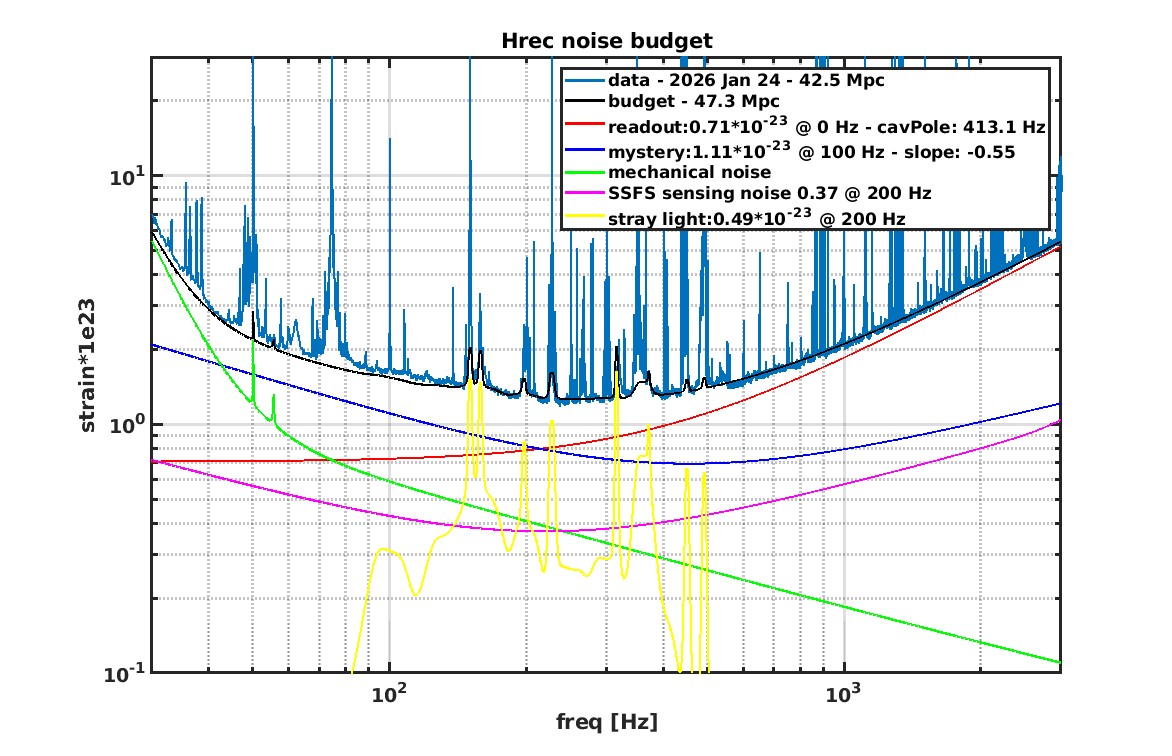
I tried to use the low-passed model of mystery noise also for different data. In particular, I was very curious about the very bad data collected before the TCS adjustment which removed the big problem on B1s. In fig 3, blue curves, some characteristic figures of merit of that working point are shown, compared to the ones obtained two hours later by a translation of WI DAS. The differences are a much darker B1s, with no change of B1p, and a higher range. The increase of the range looks like a big reduction of mystery noise (fig 4). The two curves are different also regarding the amplitude of some well kown structures normally associate to stray light. This is not surprising: always happened that more light coming out from the dark port creates problems of stray light and problems of sensitivity.
The application of the automatic fit to the bad data (before TCS tuning) gives an acceptable result (fig 5) and an estimation of excess (mystery?) noise 50 % larger than the one obtained for the very good data analysed in the first plots.
I will draw some conclusions from this analysis:
- The sensitivity we can observe with SR aligned is largely dependent on the working point tuning. The effect on the sensitivity of the diafragm installed on SR can be somehow covered by other changes and any attempt to make pre-post comparisons faces that difficulty.
- We should not exclude the presence of different sources of noise affecting the sensitivity in this complicate state of the ITF. If we want to evaluate the amplitude, the shape and the variability of the specific noise we use to call 'mystery' noise, it should be better to minimize the noises that can have more normal explanation, like the stray light. As the mystery noise, the stray light depends on HOM content in the dark fringe and can put some bias in our attempt to have a precise correlation between HOM and some 1/sqrt(Hz) shaped noise of different origin.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}