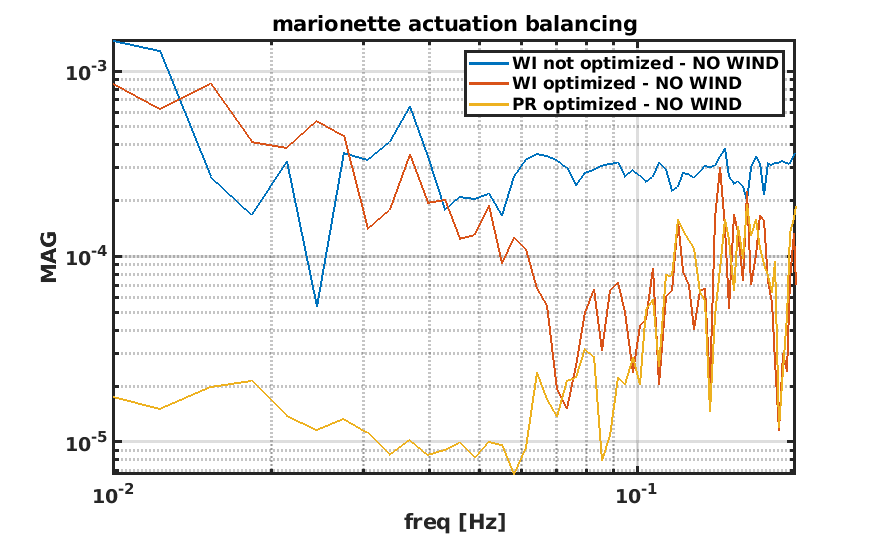
The activity regarding the balancing of NI, WI and SR MAR Z actuation is concluded, because there is no margin to reduce more the coupling from Z CORR ot TY CORR by a simple adjusting of driving coefficients.
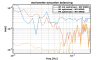
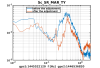
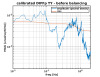
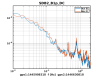
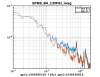
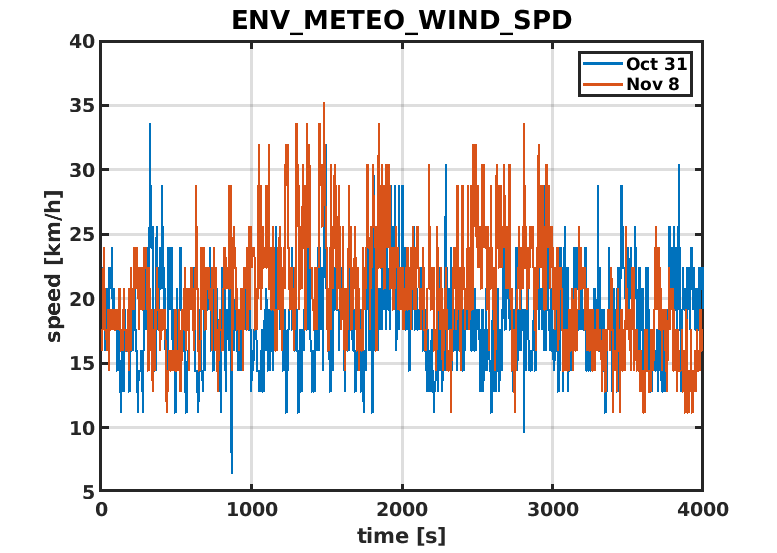
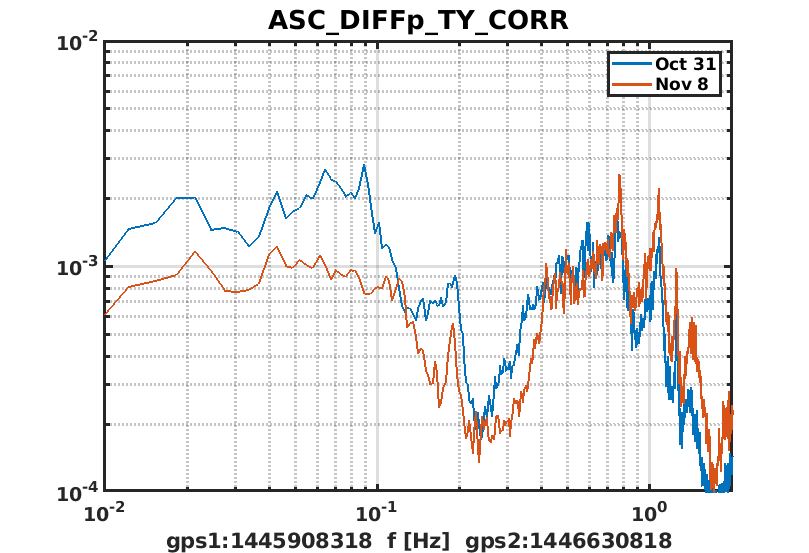
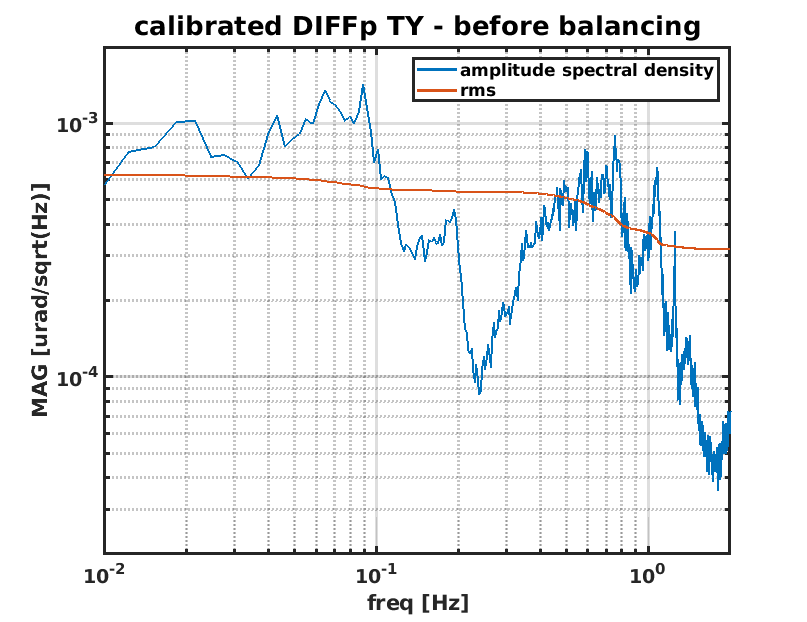
The impact of the re-balancing on the alignment stability has been evaluated, comparing recent data in moderaterly windy condition with older data in similar condition (fig 1). The spectrum of the alignment error signals correlated to the Z actuation mis-balancing is shown in the following figures. DIFFp_TY, the most important d.o.f. of the arm alignment, is shown in fig 2: there is a clear improvement below 0.1 Hz (the changes above 0.1 Hz are very likely independent on the actuation balancing). In order to understand whether the improvement is big or small in terms if ITF stability, the total rms is the quantity more appropriate to look at. In fig 3, a calibrated version of DIFFp_TY is shown, including the cumulative rms. The data refers to the first time slot, before the optimization of the balancing. We can see that the largest contribution to the alignment fluctuation comes from the frequency band above 0.1 Hz; the margin of rms reduction is about 10 %, in this environmental condition. Following this criterion, the expected improvement of the ITF alignment quality, induced by the actuation re-balancing, is small.
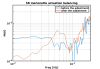
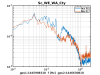
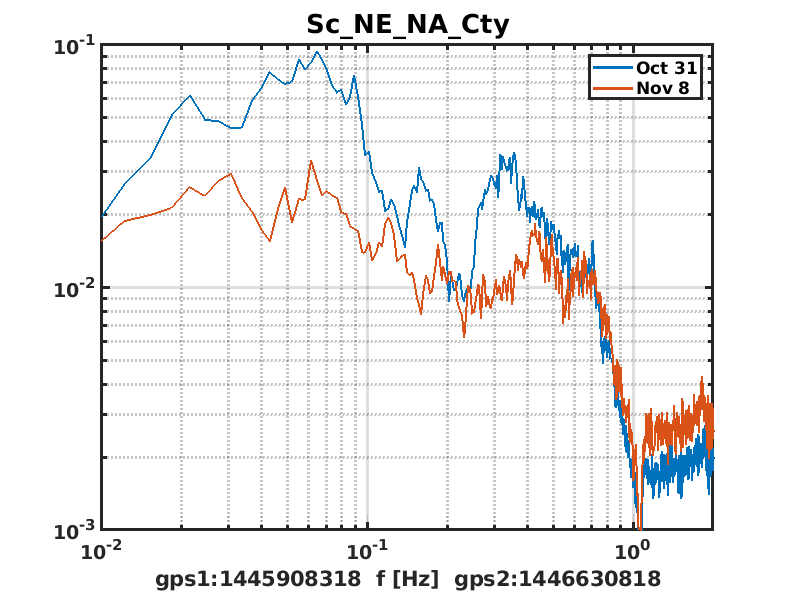
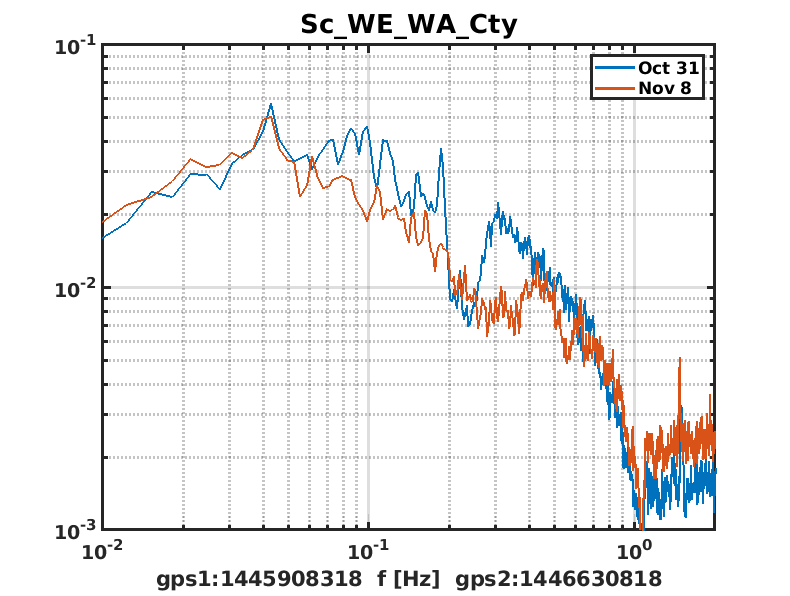
North arm and west arm TY SOFT d.o.f.s are shown in fig 4 and fig 5. Both are more accurate after the balancing; especially north arm. We can guess the total rms to be significantly improved as well, but this analysis is not straightforward, when the in-loop error signals are optical levers. Moreover, we use to consider the ITF quite tolerant respect to SOFT fluctuation and we never had the impression to be close to some limit, concerning the accuracy of those d.o.f.s. In conclusion, it is difficult to assign a grade to the obtained improvement.
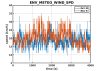
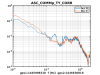
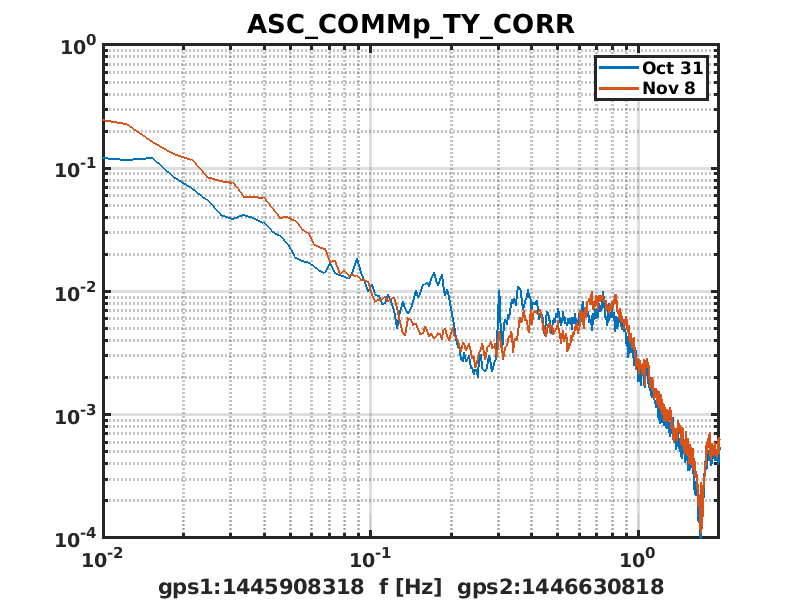
Fig 6 shows DIFFp_TY, the last d.o.f. on which NI WI actuation balancing should have an impact. In this case no improvement is visible: the recent data are even worse. This is something to better investigate: a different noise source needs to be identified, which overcome the effect of the actuation mis-balancing.
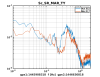
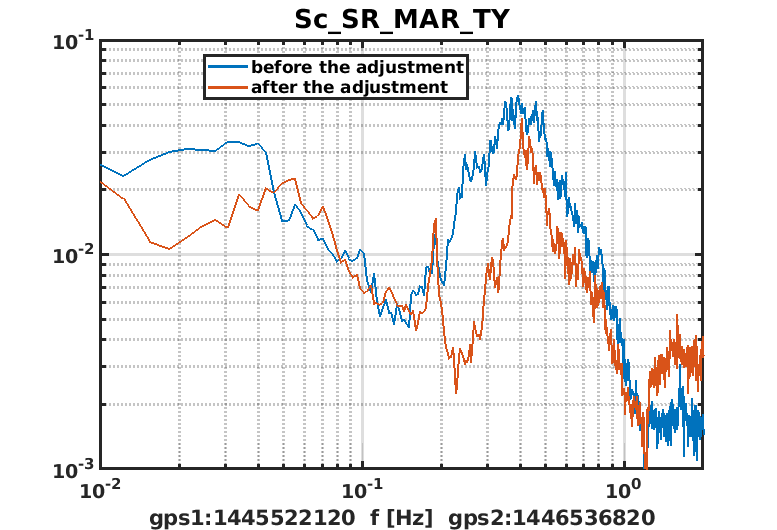
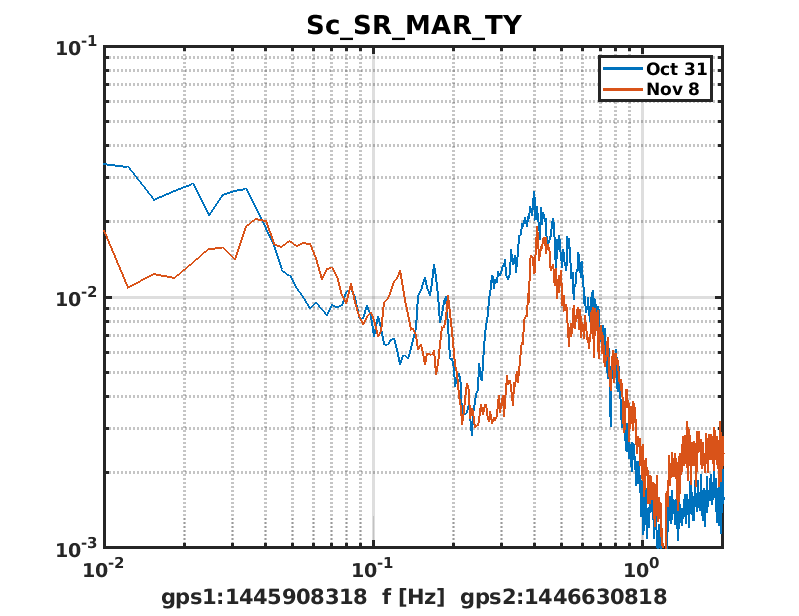
Fig 7 shows SR_TY: the rebalancing has an effect, likely not relevant, as already discussed in a previous entry.
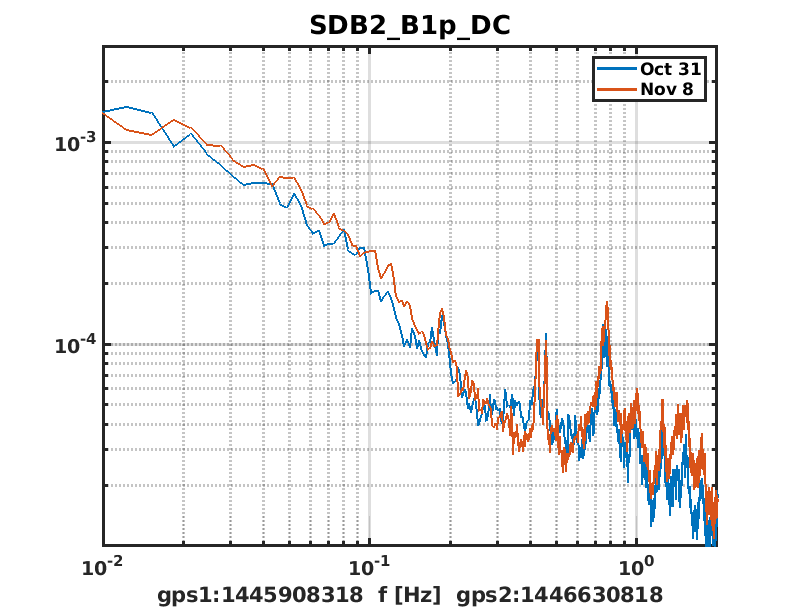
Finally, let's try to find the effect of the actuation balancing on the usual overall figures of merits: B1p power (fig 8 ) and sidebands power (fig 9). According the choosen data, there is no visible improvement.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}