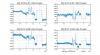
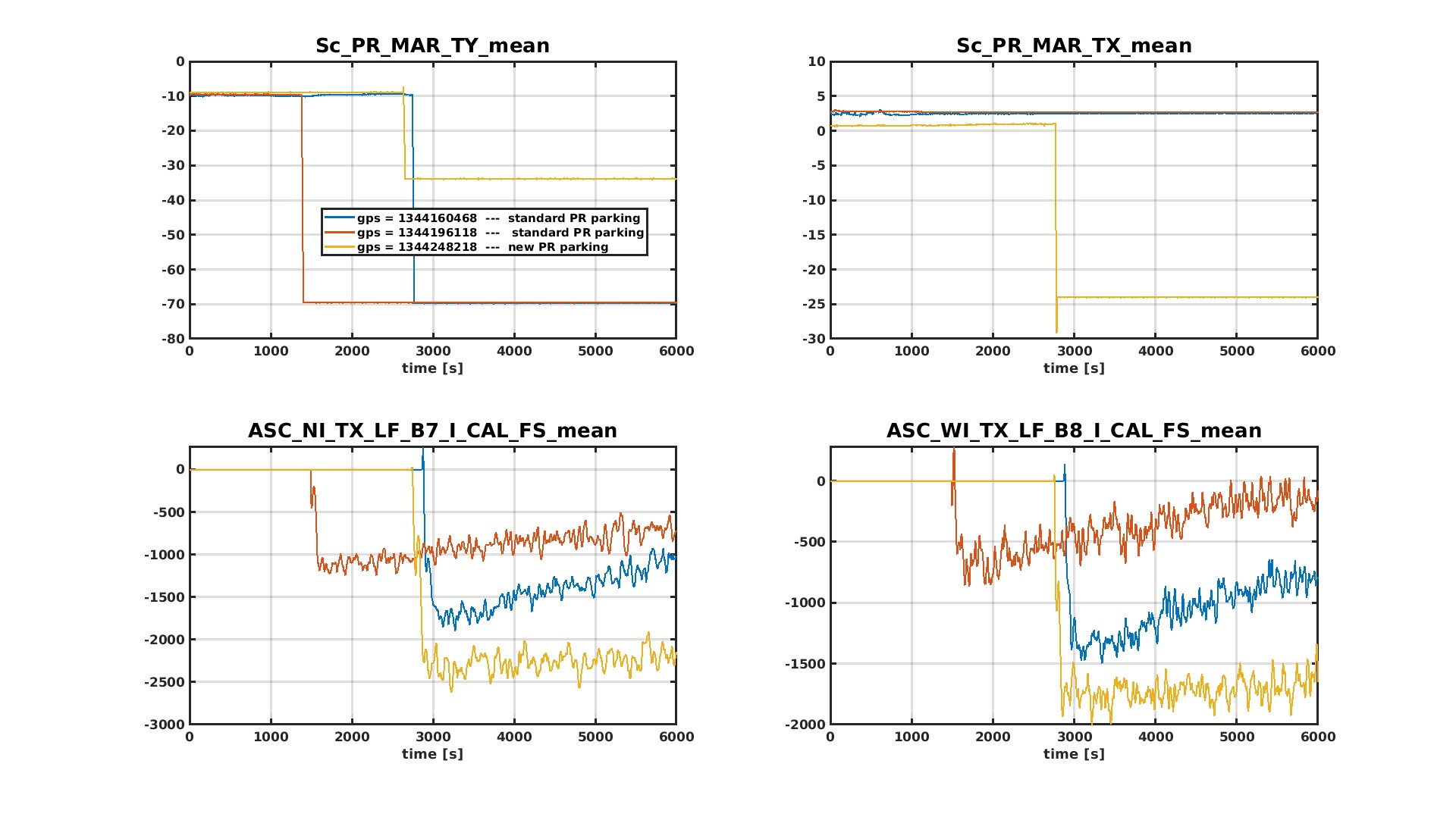
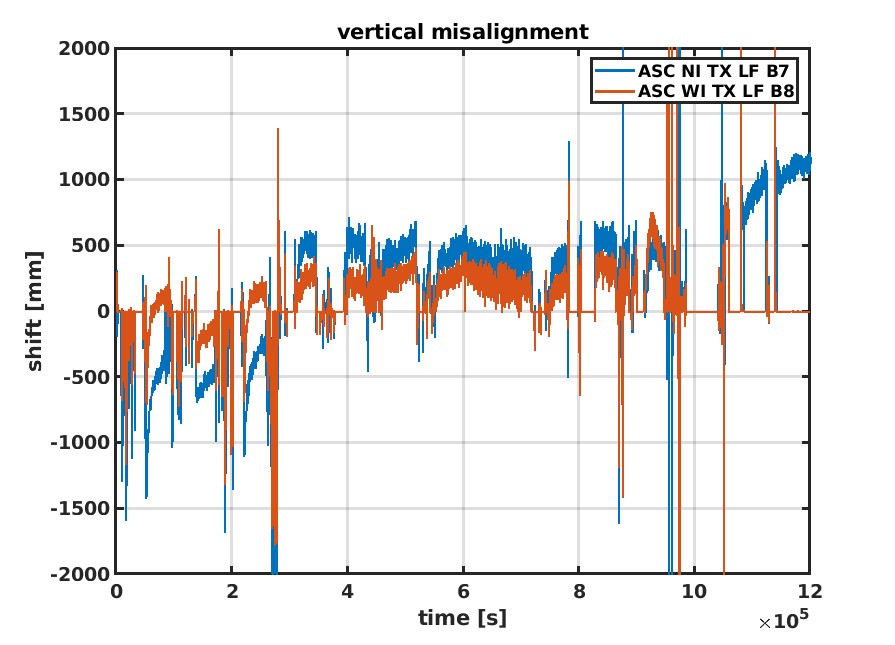
As observed several time, the alignment of the cavities is not stable when the procedure starts after a long period of work with PR aligned (lock of CITF or CARM NULL). In fig 1, blue and red plots show two example: B7 and B8 demodulation w.r.t. ITM TX angular lines has a thermal transient. In one of the two cases, the effect is more evident because it comes from a longer period of work in CITF.
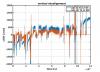
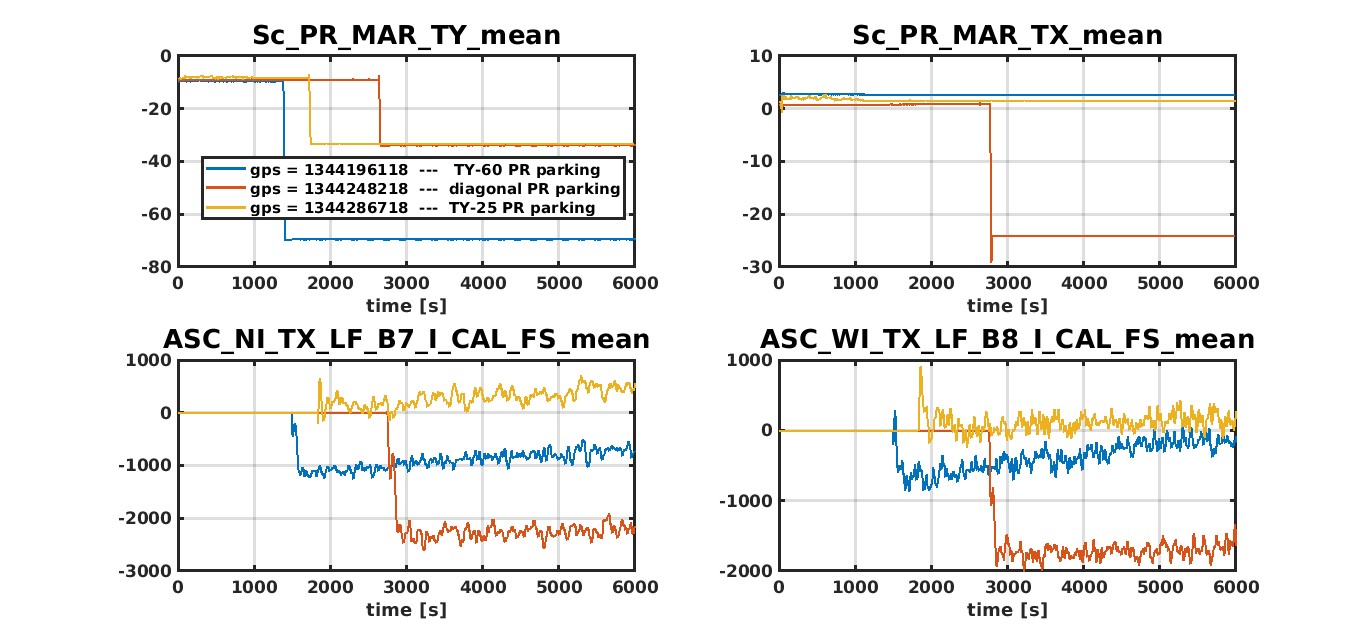
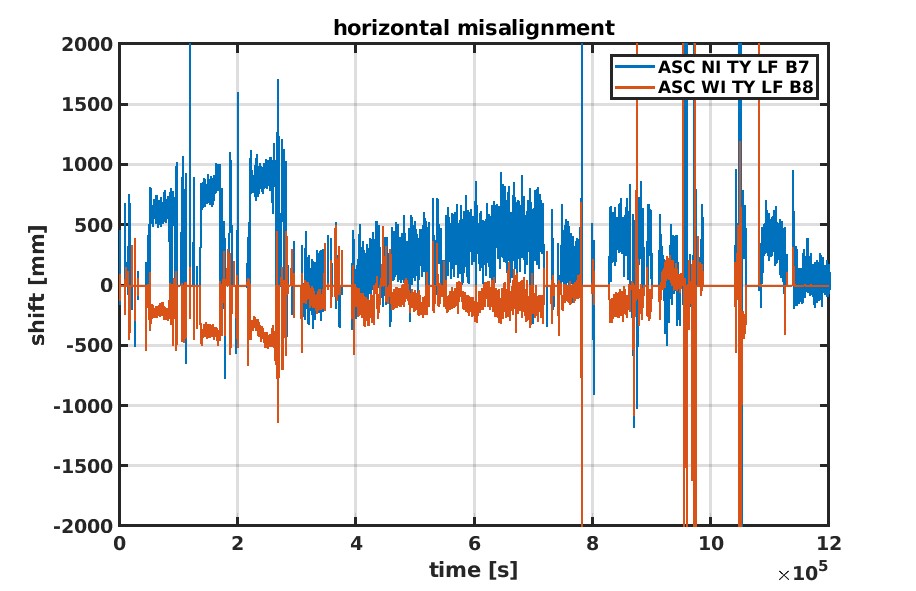
An exploration of different parking positions has been carried on. At first, the PR horizontal misalignment has been reduced from -60 to -25, while the cavity were locked. A backwards transient was triggered (see first 10000 s of fig 2), meaning that the difference between PR aligned and PR parked was reduced.
Later, a vertical misalignment has been added to the parking position, inducing a sudden additional offset to the cavity alignment error signals (fig 1, time 16000 s). The fact was interpreted as a further compensation of the difference with respect to the PR aligned positon.
At this point, PR has been aligned, CITF locked and left there for 45 min. Then PR has put back to the new parking positon and the cavity alignment has been engaged. No transient in the alignment error signals has been observed (see fig 1, yellow plot).
Looking now at the data, there is no reason to prefer this last parking position, with the additional misalignment in TX. So at the end the TX offset has been removed and the new parking position has been defined as deltaTY = -25 urad.
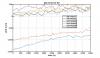
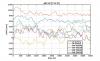
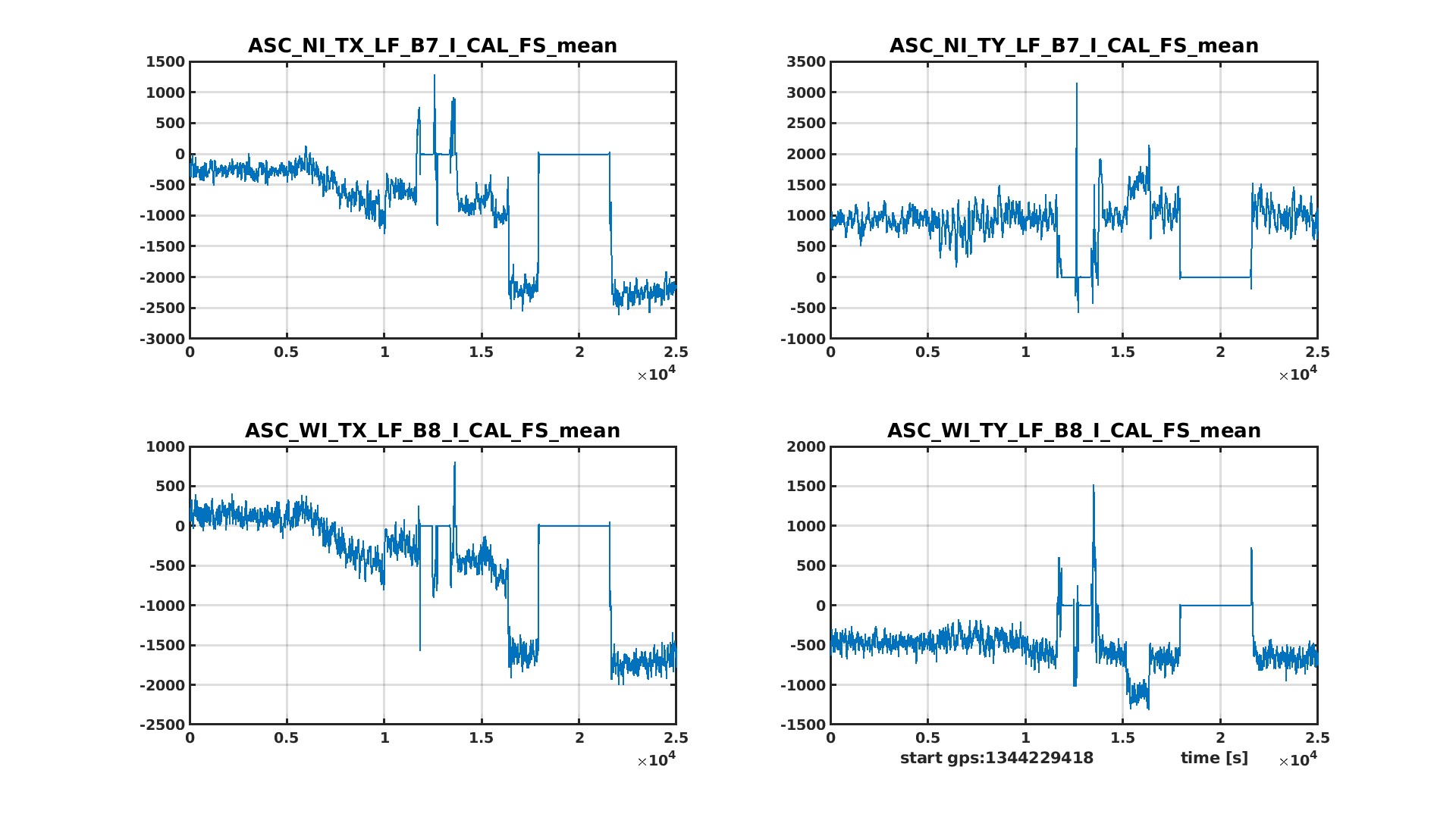
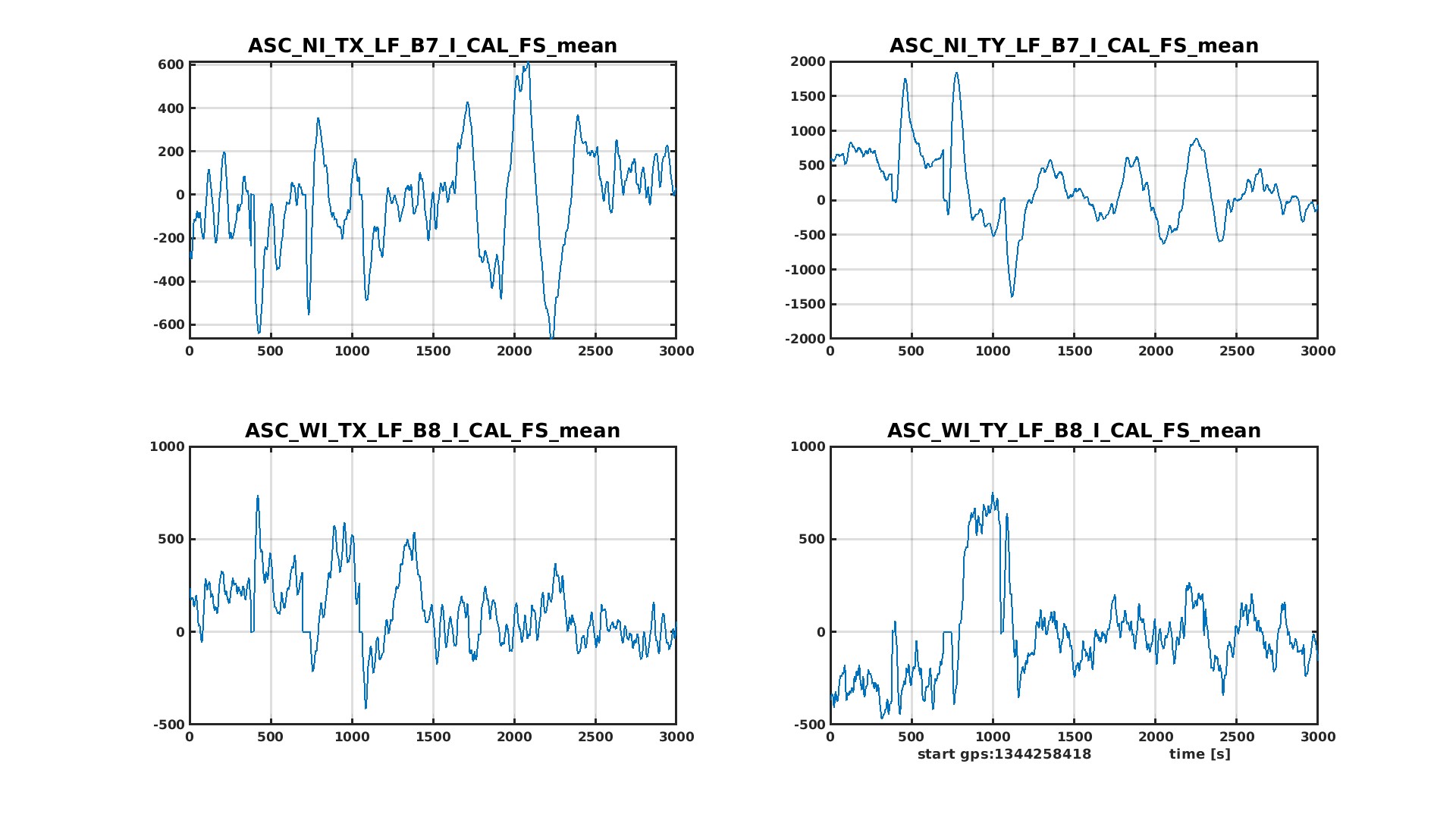
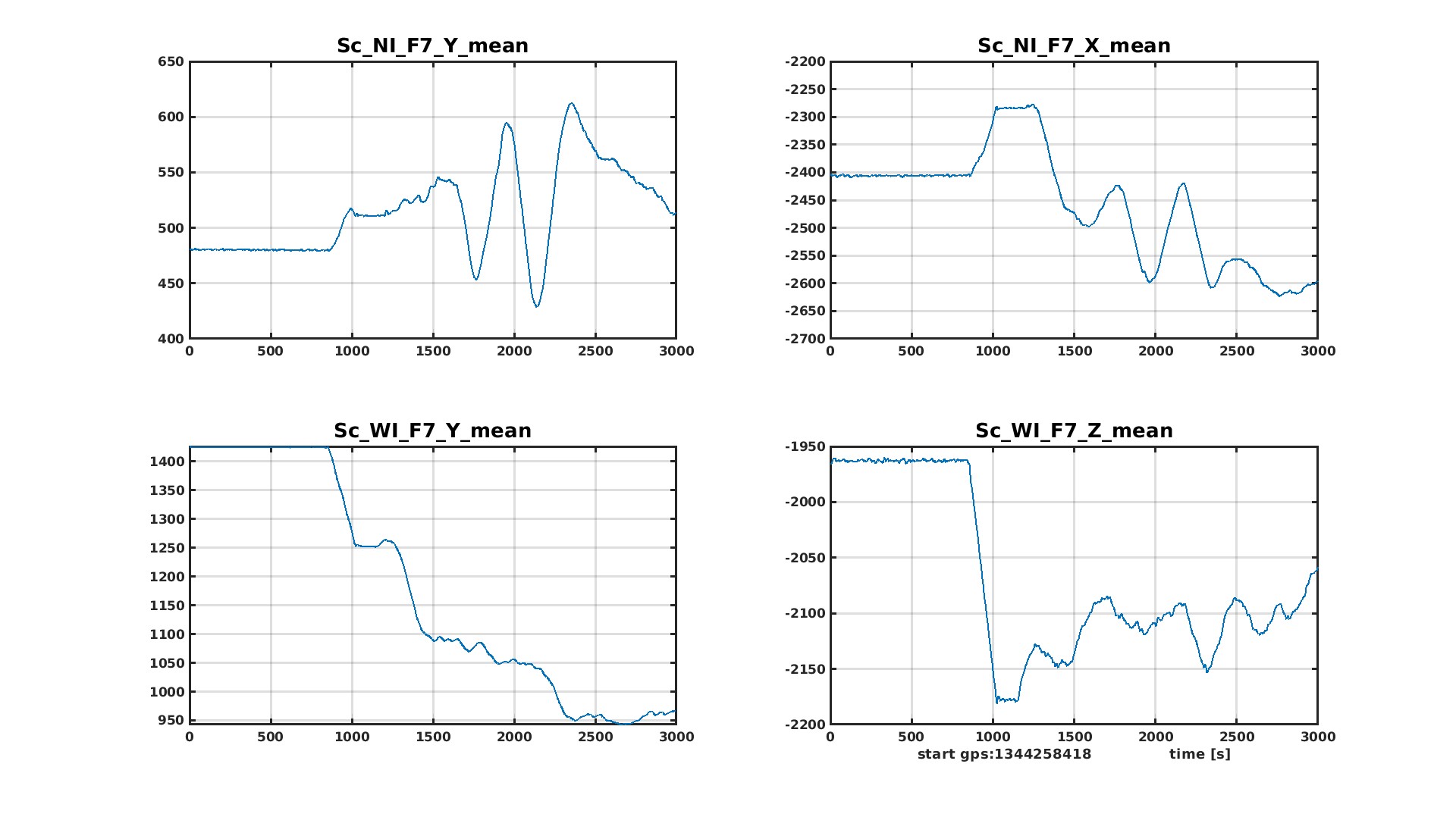
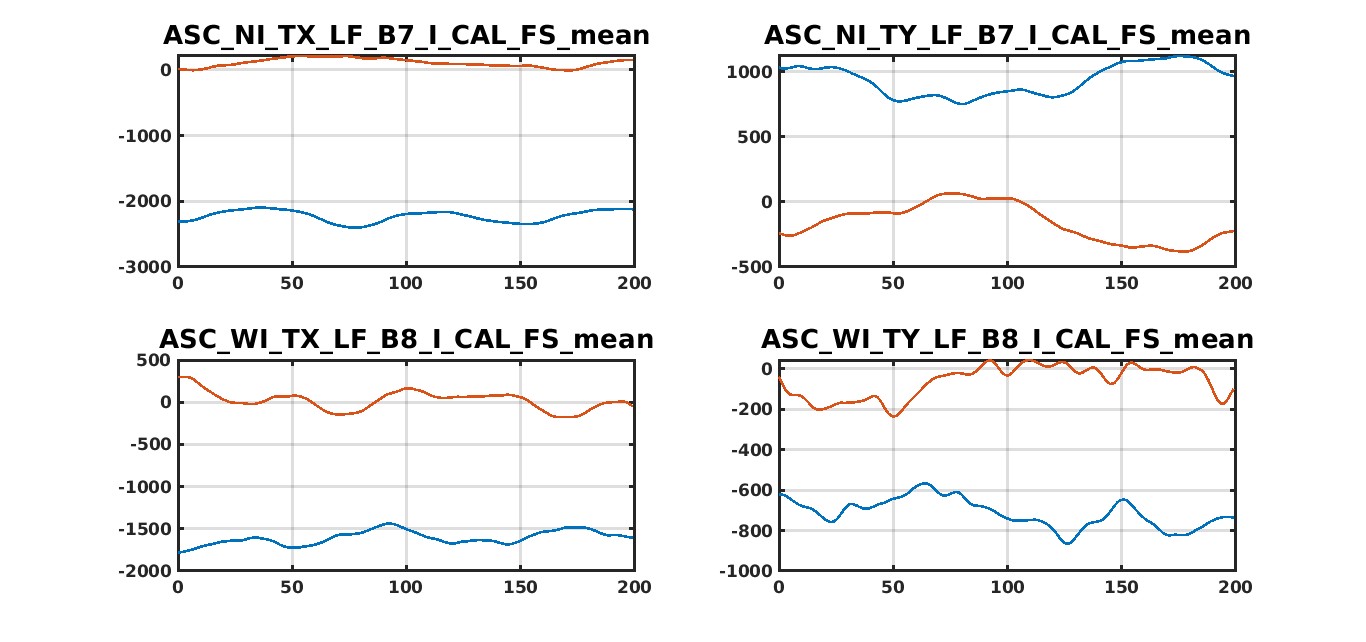
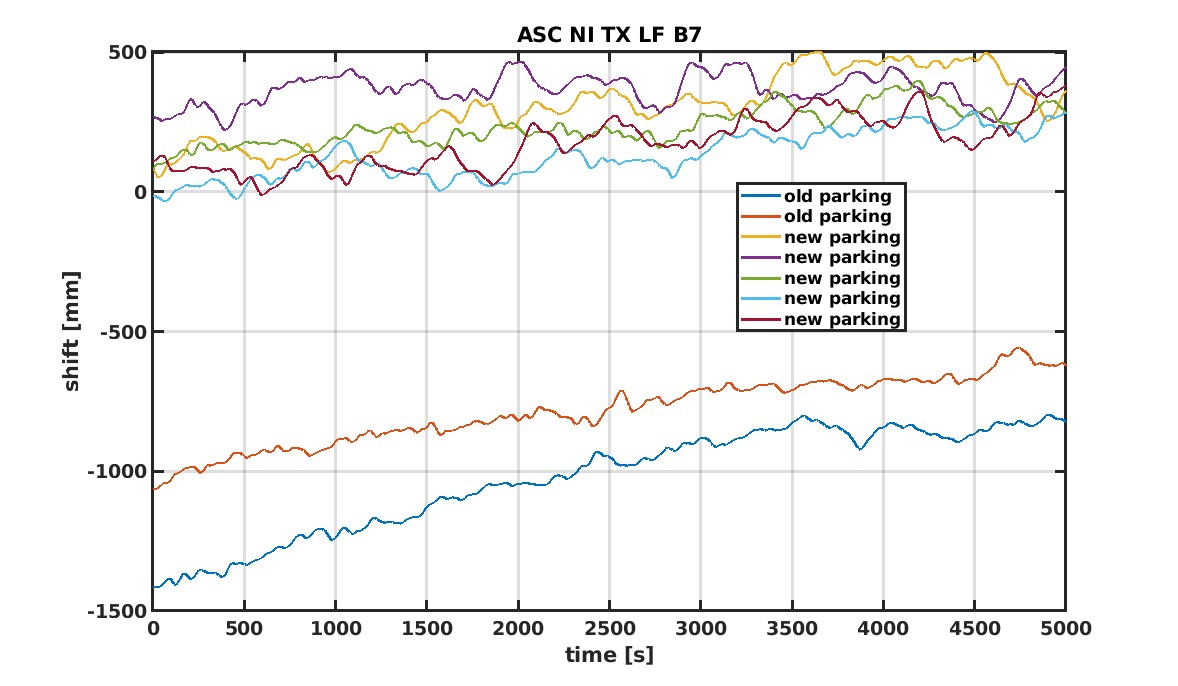
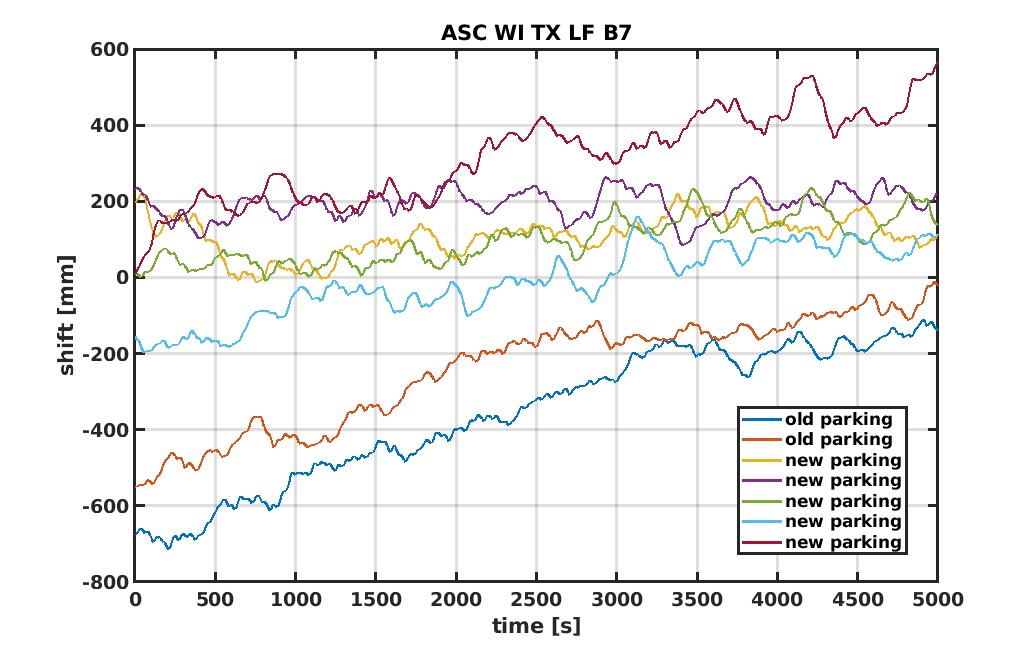
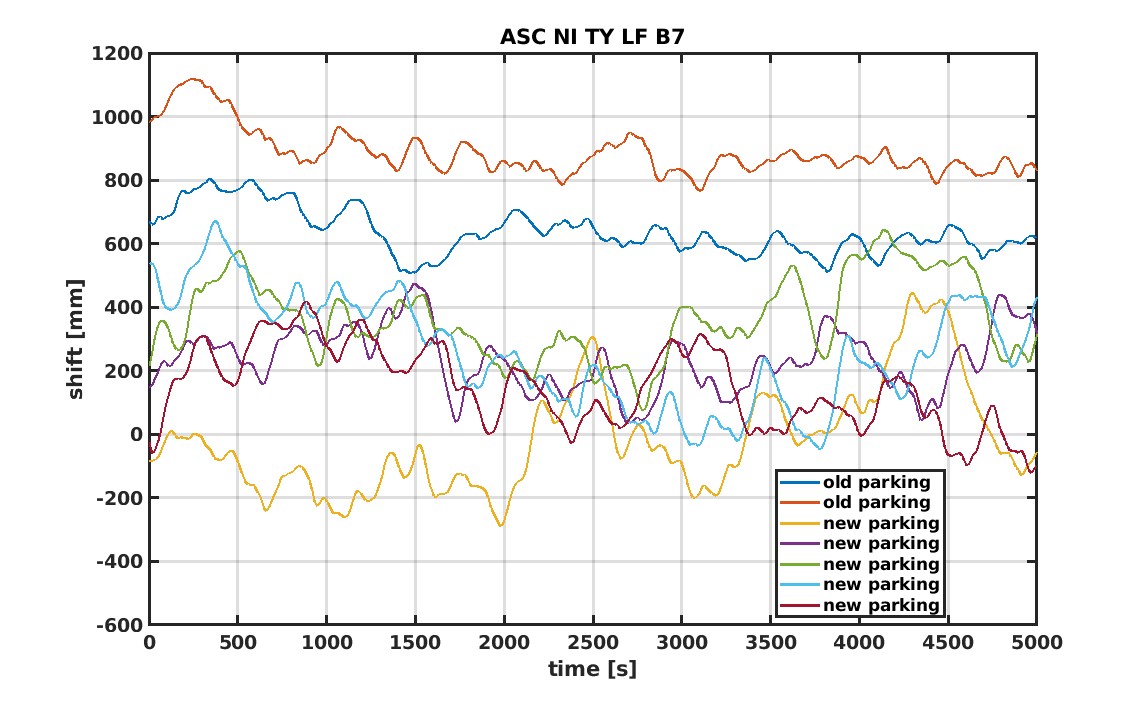
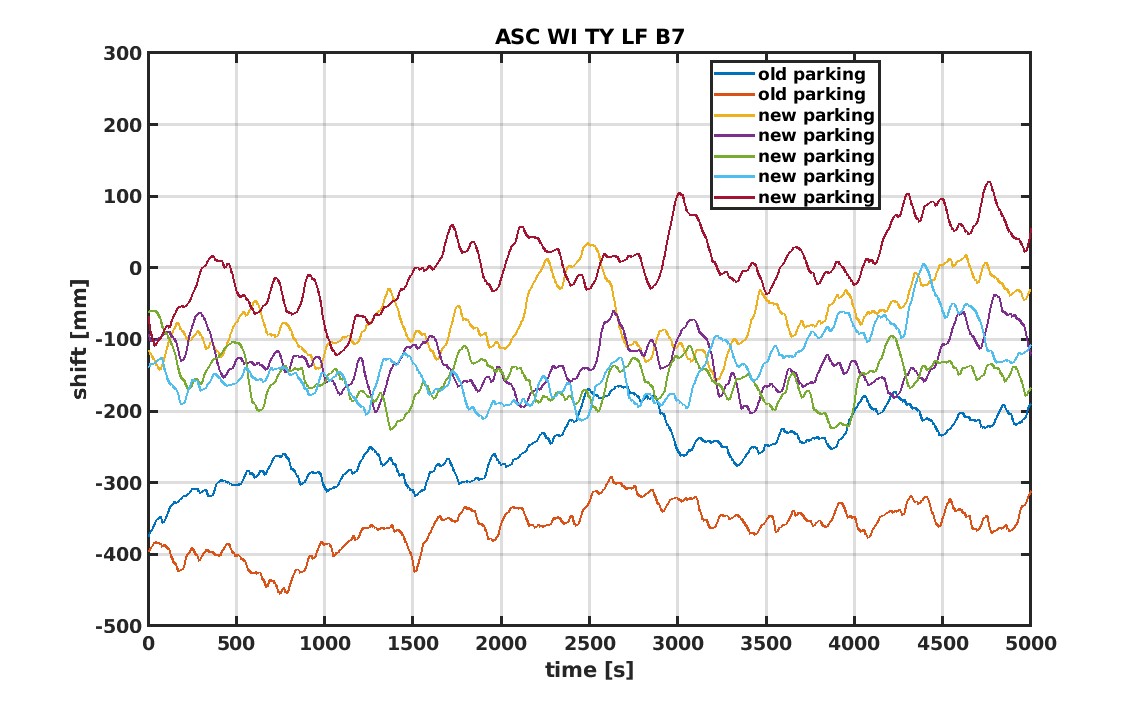
The next activity was the zeroing of the alignment error signal through the usual action of the beam, plus a refinement obtained engaging the loops on ITMs transversal position (fig 3, fig 4). The aim was to align the cavities as better as possible and see the difference in the quality of a subsequent CITF alignement. Unfortunately, this operation has been done in the 'diagonal' parking, compensating 1 mm additional vertical shift which probably should have not been compensated. In any case, troubles in the automation prevented the check of CITF alignment.
We will see the evolution of the error signals in this parking position and eventually we will make a further step for zeroing them.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}