We successfully ported PyPllServer to the default cmt-conda environment.
After that, we prepared an automation branch (dev-mb_220805_for_long_run) adjusted to the long test run. With respect to the currently most updated dev-mb branch it contains changes:
- PySQZ_IR is enabled all the time
- LFC_UGF decorator is disabled (verify if this decorator or LOCK_FLAG creates a problem in case of lock at low GR transmission).
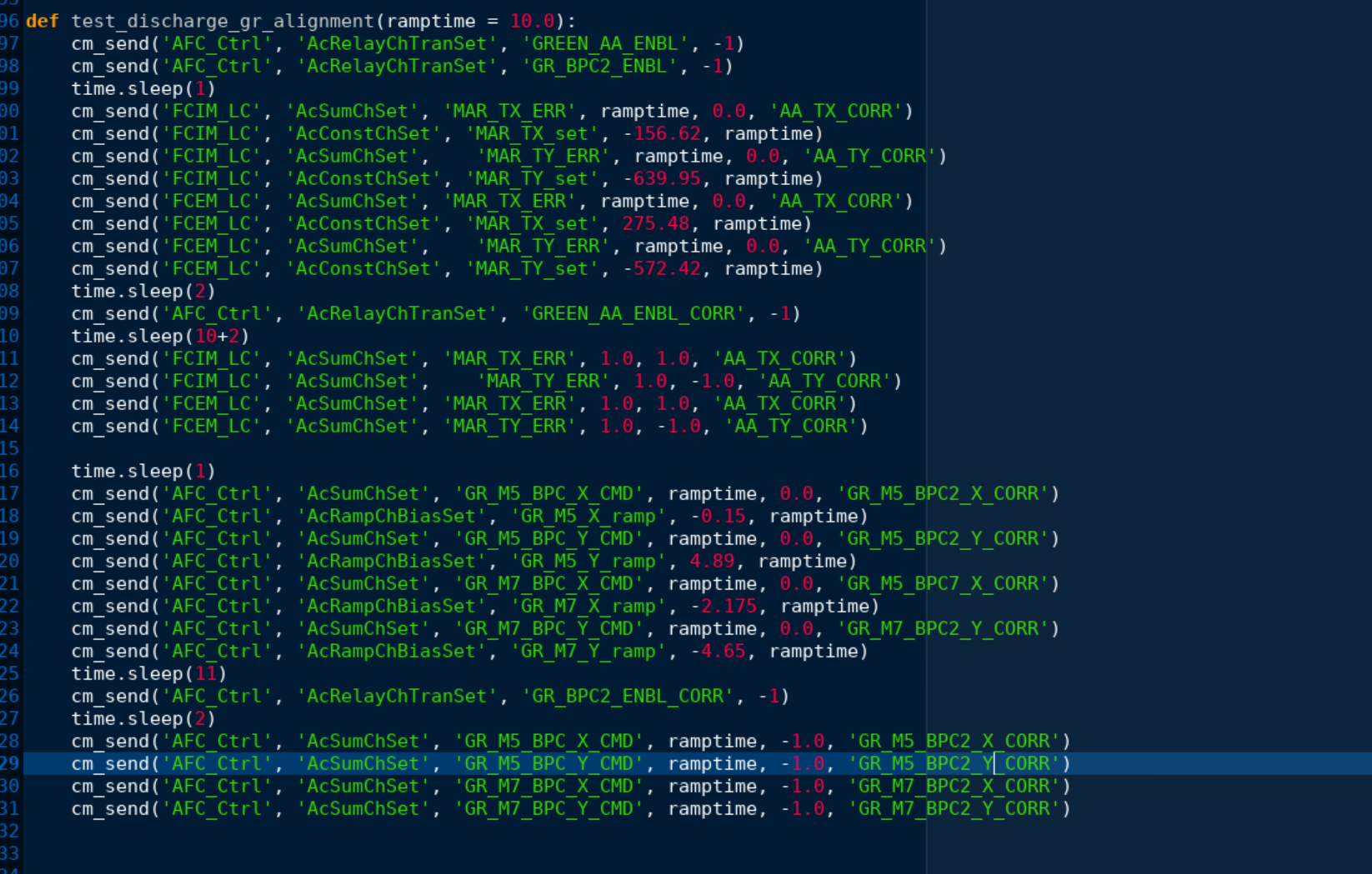
In the process we realized that a measurement of the IR AA sensing matrix might be necessary. We made an attempt but due to the presence of strong wind we were not successful. On the other hand we dedicated time to write down the sensing matrix measurement algorithm which you can find beneath.
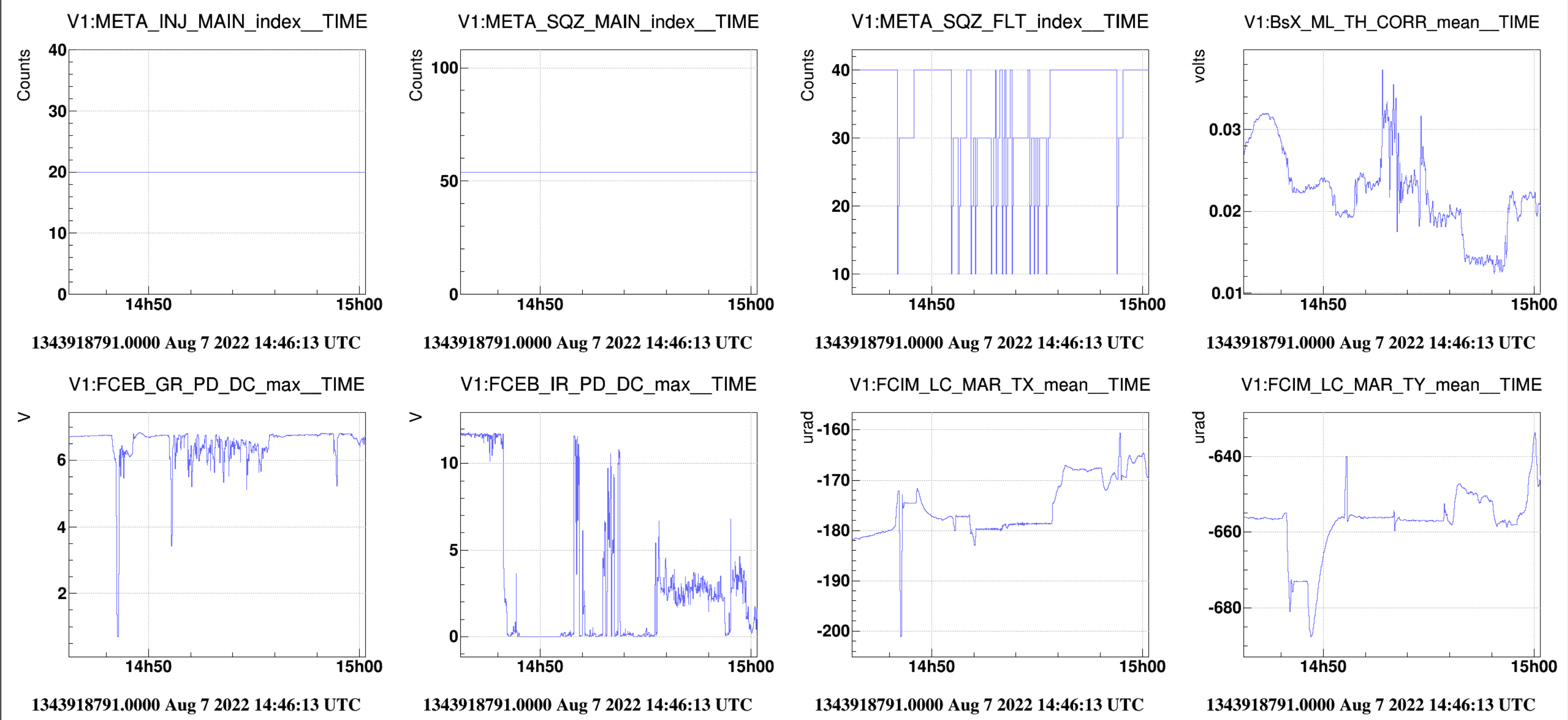
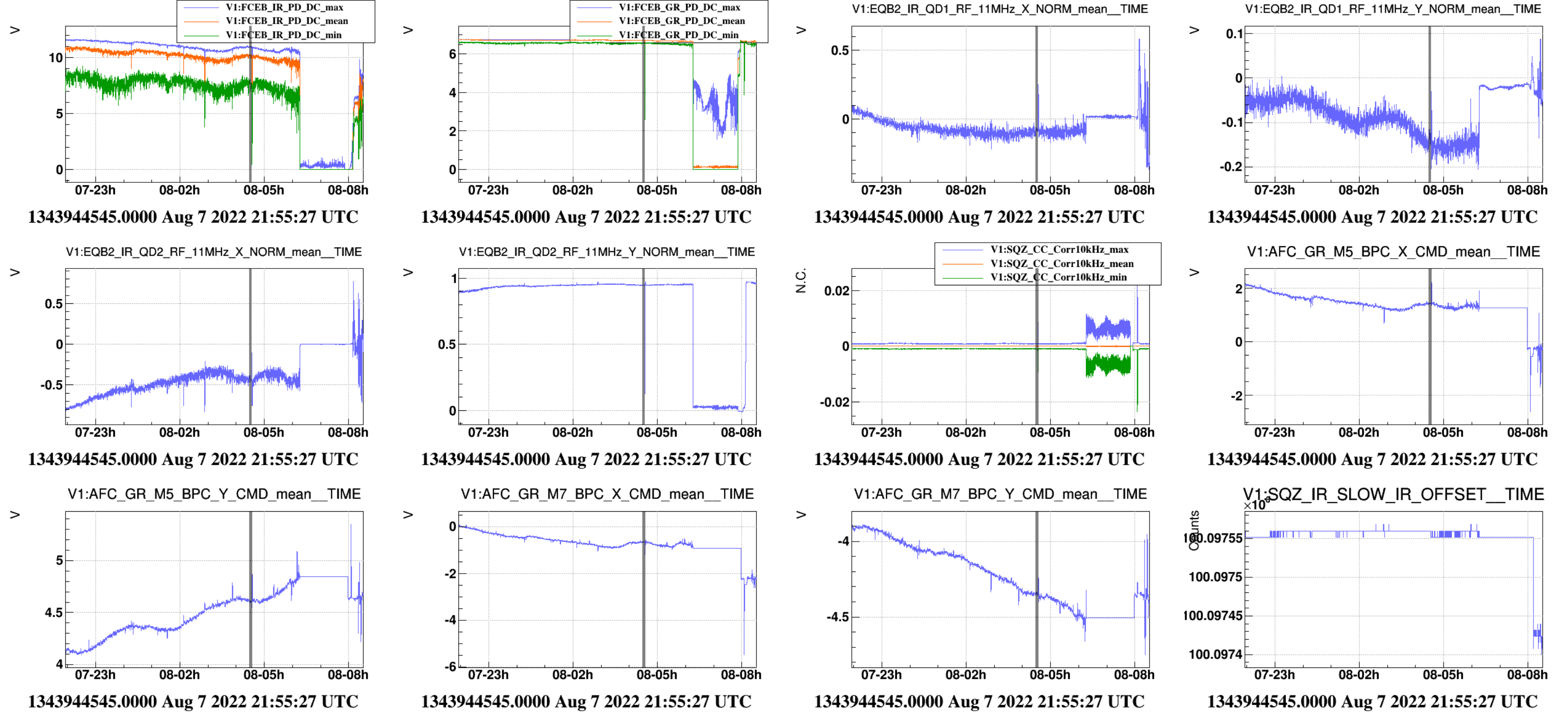
The automation was started at (useful data since) 1343766188 05 Aug 2022 20:22:50 UTC
IR AA sensing matrix measurement procedure
Prerequisites:
- Cavity is AOM_LOCKED_IR, (IR_AA is off).
- Demodulation Phase of the error signals must be correct.
- Error signal noise below: ?
- IR Galvos must be ON and OK
Actuators
- EQB2_IR_QD1_RF_11MHz_X
- EQB2_IR_QD1_RF_11MHz_Y
- EQB2_IR_QD2_RF_11MHz_X
- EQB2_IR_QD2_RF_11MHz_Y
Error signals
- EQB1_IR_M3_MT1_X
- EQB1_IR_M3_MT1_Y
- EQB1_IR_M5_MT1_X
- EQB1_IR_M5_MT1_Y
Steps:
- Put the offset on one actuator (command is in VPM)
- Wait one second
- Read average values of all error signals
- Invert the offset on the actuator
- Wait one second
- Read average values of all error signals (detrend?)
- Calculate the differences between the two readouts and divide by the difference in offsets.
- Put results to the matrix column.
- Repeat steps from 1-8 for other three actuators.
- Invert the measured matrix








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}