A simple response has a shape of
where is the frequency of the line used for the measurement and
is the frequency of the pole.
This means that a priori the transformation of phase to pole frequency should be
with some phase offset at the line frequency due to other reasons.
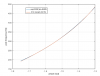
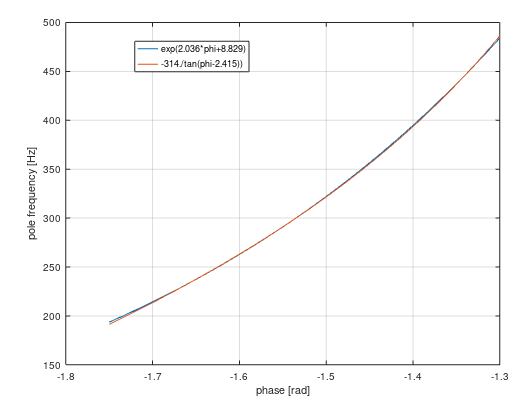
Figure 1 shows that the fitted exponential overlaps very well with the formula above when using the injected line frequency of 314Hz and a phase offset of 2.415 radian.
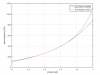
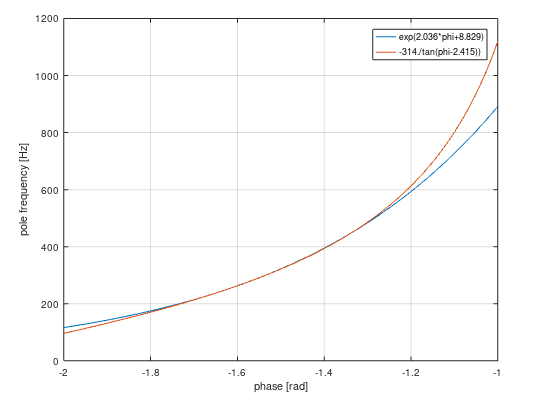
Figure 2, if ones start to expand the range considered the two curves stop overlapping, for pole frequencies below 200Hz.
At the end, it should not matter much which function is used for the conversion in this application. Using the inverse of the tangent is more satisfactory intelectually, and it may lead to less issues computationally. Because the exponential function can be slow in some cases, and lead to a less stable time for finishing each real time computation cycle.
{kind=link}
{kind=link}