This morning some changes were applied to the SWEB controls with the goals of cleaning up the configuration file of the ACL related process and improving the inertial control along Z. Here the list of actions:
- cleaning up the script from filter banks and internal channels no longer used
- changed the equalization filter for the Trillium channels: first the vertical raw output was cross calibrated against the WEB Environmental seismometer in order to extract the correct DC gain and then the filter was updated to correct the sensor response above a few Hz.
- new calibration of the F0-geophone was performed: white noise (0.1-5Hz) was injected in F0_Ty and the TF F0-geophone vs Trillium X channel was measured. New parameters are: G=0.159 [V/um/s], f0=1.04Hz, Q=0.685. Previous parameters were: G=0.165 [V/um/s], f0=1.01Hz, Q=0.72.
- F0-geophone equalization filter was changed: now plant inversion, velocity-to-displacement conversion and high-pass filtering (4th order Butterworth at s=0.1) are applied at once.
- blending in X,Y,Z between bench and top stage LVDTs was moved from s=0.3 to s=0.1.
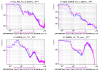
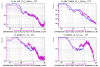
- blending between LVDT and seismometer along Z has been moved from s=3 to s=0.7. Higher order blending filter is now used (5th order high-pass, 3rd order low-pass). Some improvement wrt previous configuration is already visible in the residual angular motion of the suspended bench (See plot showing Tx in the two cases; seismic noise is also show for reference), though today the ground motion amplitude was on the very low side. Better behavior is achieved around 300-500mHz but at the price of some overshoot around 100mHz.
The activity stopped at 3:45PM. No change has been introduced in the X and TY for which the inertial control needs still to be restored. In X still only tracking wrt to the WE SAT is engaged. Next steps we foresee are:
- further optimize the Z blending filter when data with high seismic noise will be available.
- restore the inertial control in X and TY; new filter banks to be tested have been already included in the current configuration file.
- introduce the new guardian that has been successfully tested on the QNR suspensions

{kind=link}
{kind=link}
{kind=link}