In order to allow the TCS activity on SR ring heater, the requested modification to SR payload control strategy has been implemented. Now the error signals for TX and TY control are the blending of marionette and mirror error signal, with a crossing frequency of 50 mHz. The mirror error signals are used at low frequency, so that the working point is based on the mirror signals, and no more on marionette. The mirror rotation induced by the differential heating of the mirror suspension wires will be compensate by the loop. The high frequency is still under control of the marionette, so the control filters did not require any change. The strategy has been implemented also for TY, even if very likely it is not strictly necessary.
The logic is such that, passing from the standard control to the new one, and viceversa, the working point is manteined. Moreove, the steering can be done acting on the same offsets, regardless of the strategy in use.
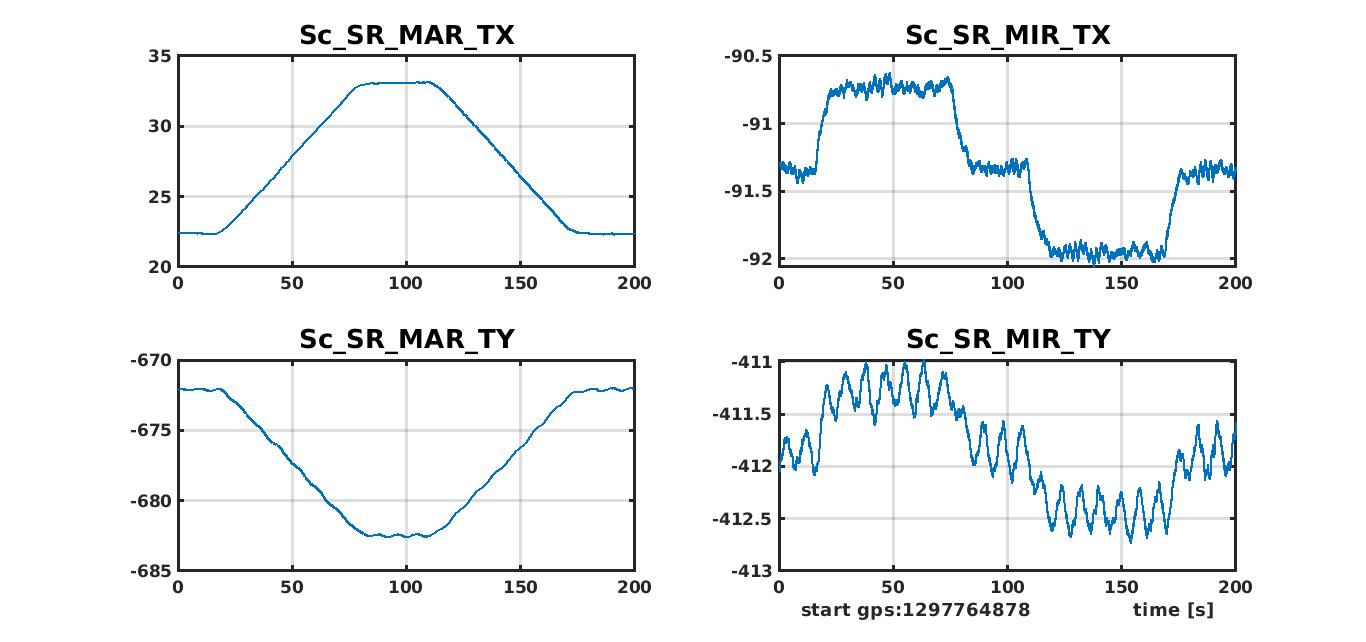
The loops have been tested, adding offsets to the mirror error signals. The result is shown in figure. An offset of 10 urad applied with a 60 s ramp is compensated with an error of 0.5 urad, due to the limited bandwitdh of the blending. It looks sufficient, but eventually the crossing frequency can be increased a bit.

{kind=link}