On Dec 10 the ITF unlocked due to an earthquake, Mag 5.9, Japan. In principle we should be robust enough for this kind of event, even in low noise configuration for the actuators. It was no more like that due to the 9.7 Hz oscillation, but on Dec 10 that problem was reduced by the improvement of OB vertical control, so the ITF unlocked for a different reason.
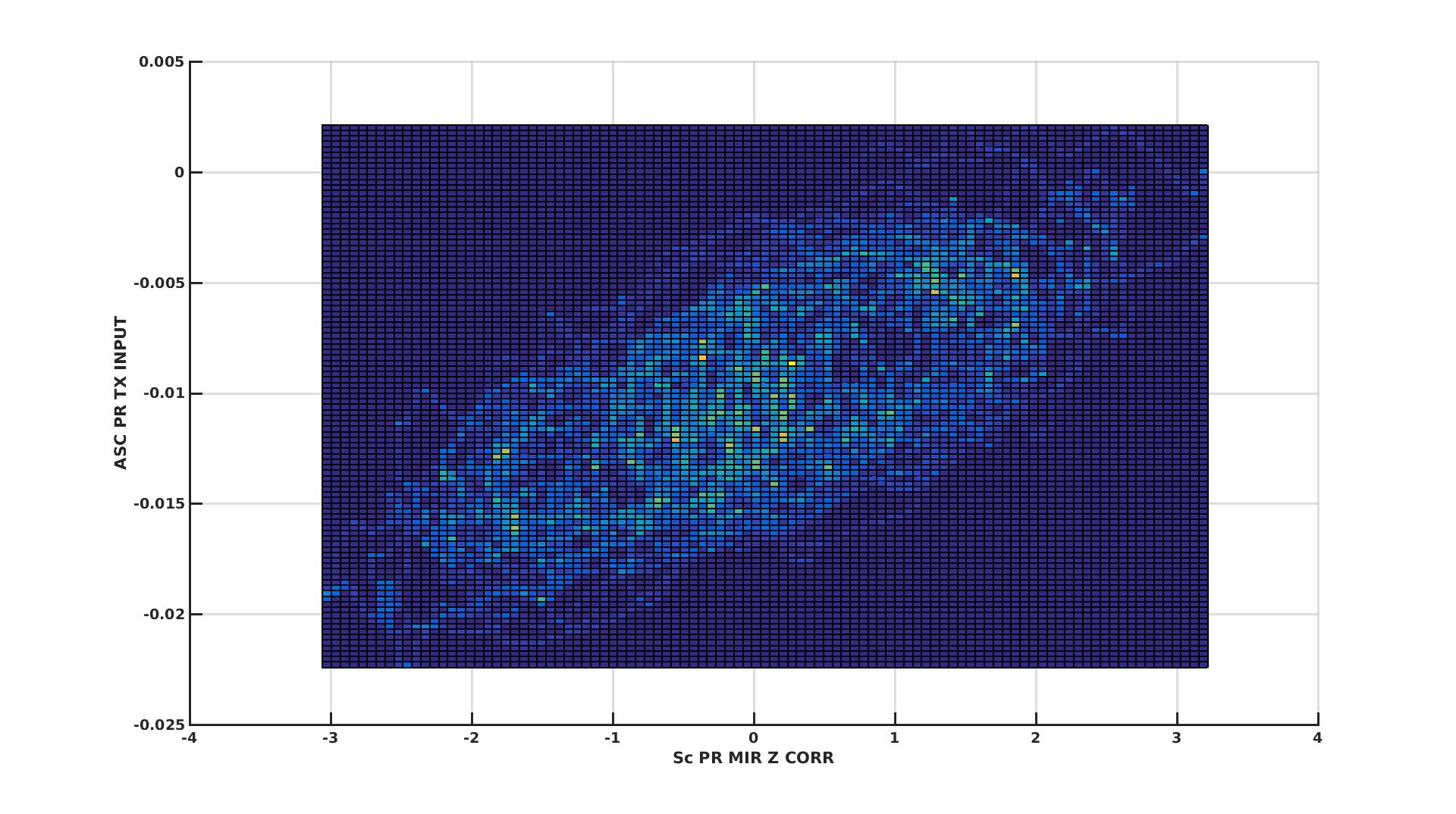
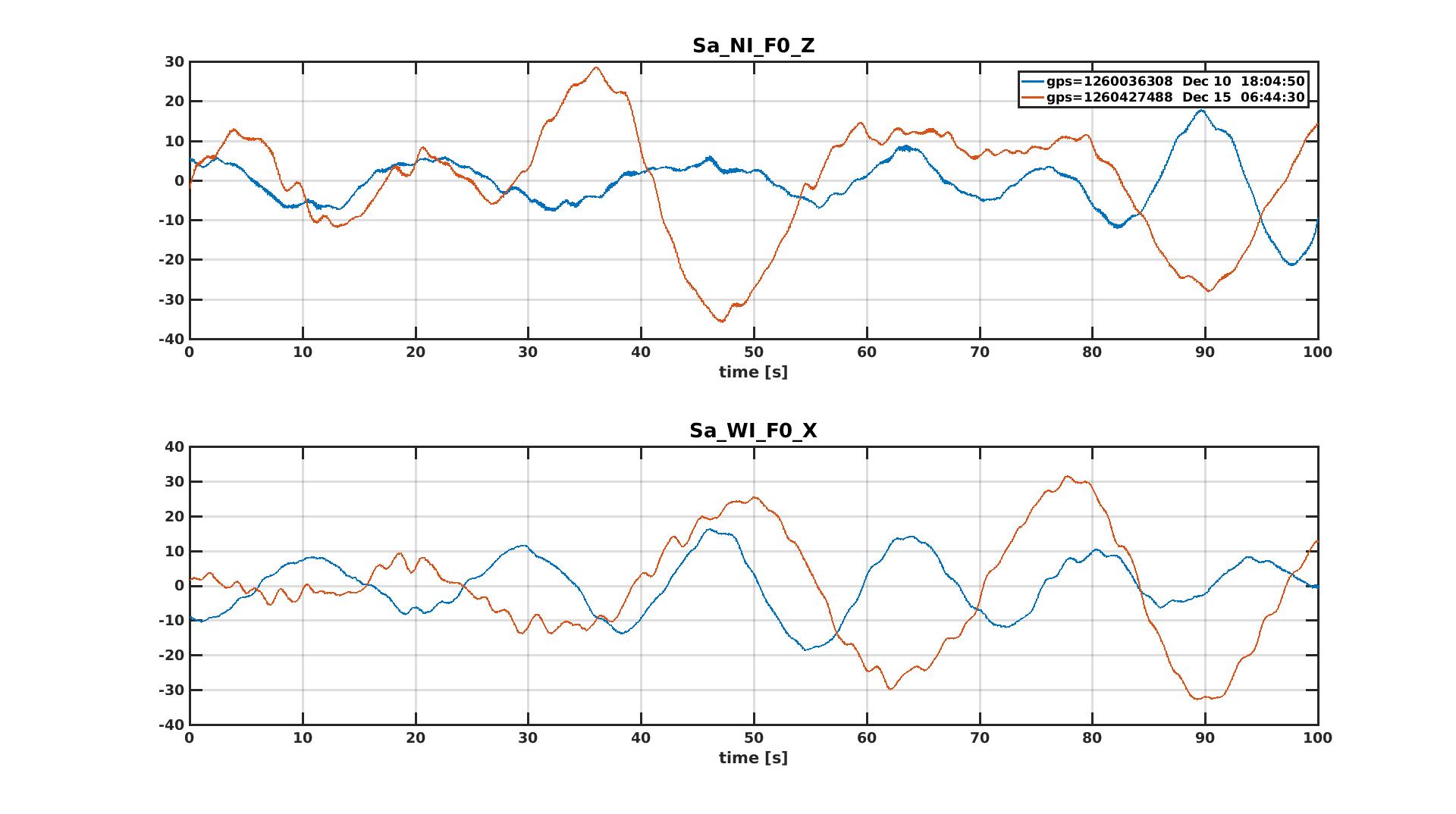
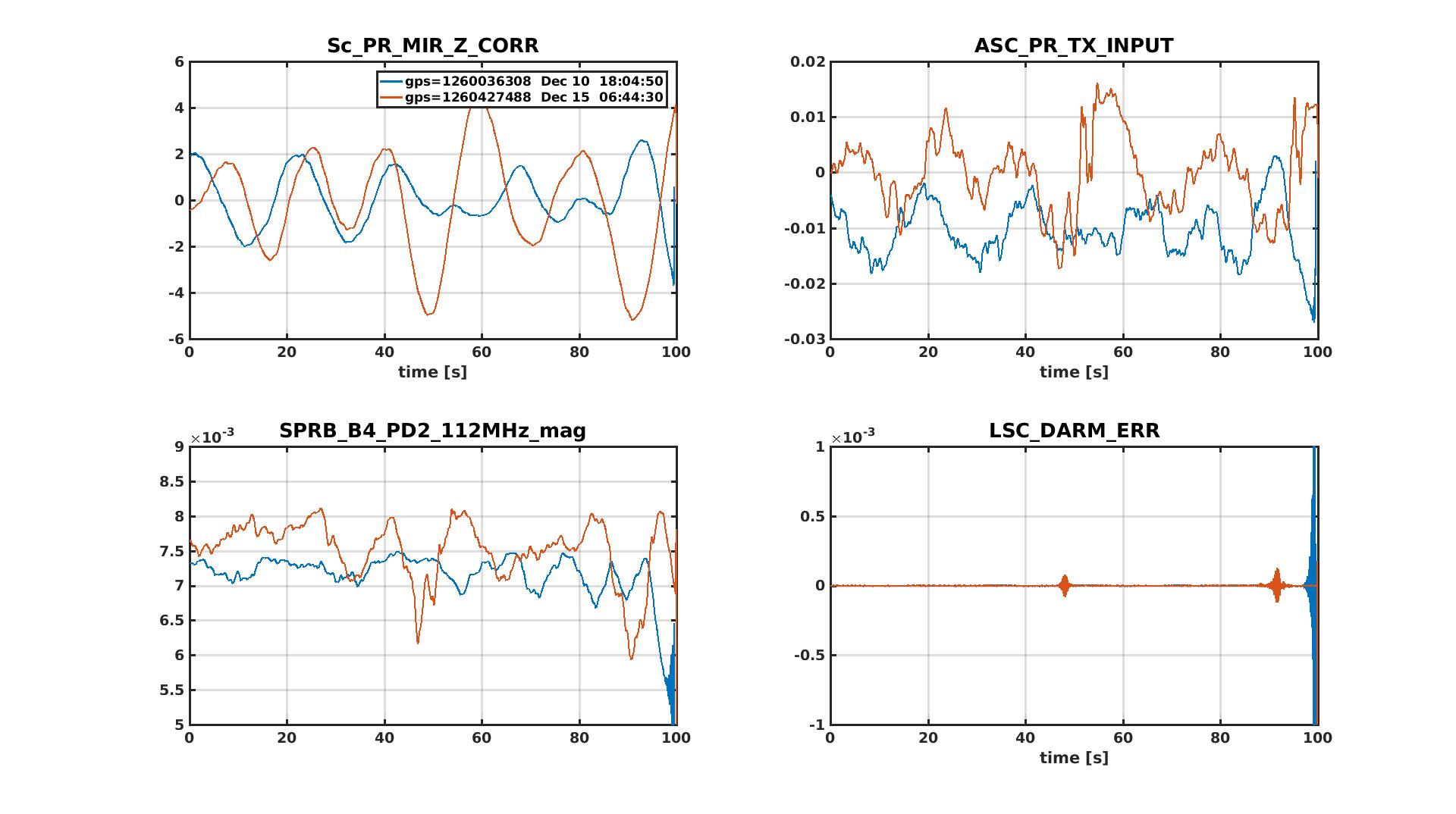
In fig 1 we see that there was a loop oscillation (MICH, or angular), probably triggered by a drop of the sidebands, which happened in correspondence with a certain deviation of PR_TX from its working point. It is also visible that this misalignment is driven by PR longitudinal correction (see also fig 2), indicating that PR MIR actuation is not perfectly balanced, but maybe also that a higher gain of the loop at low frequency could be preferable.
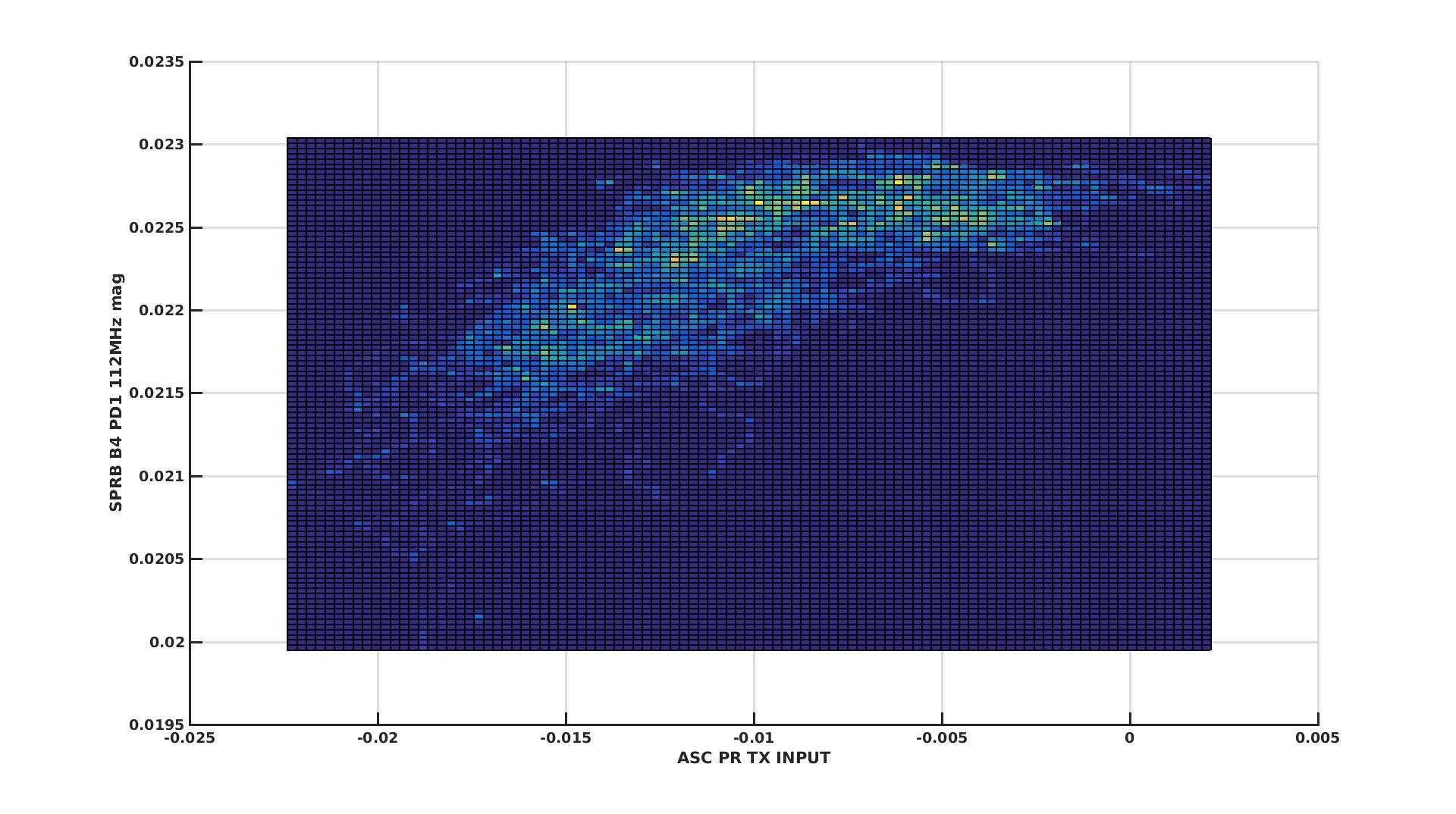
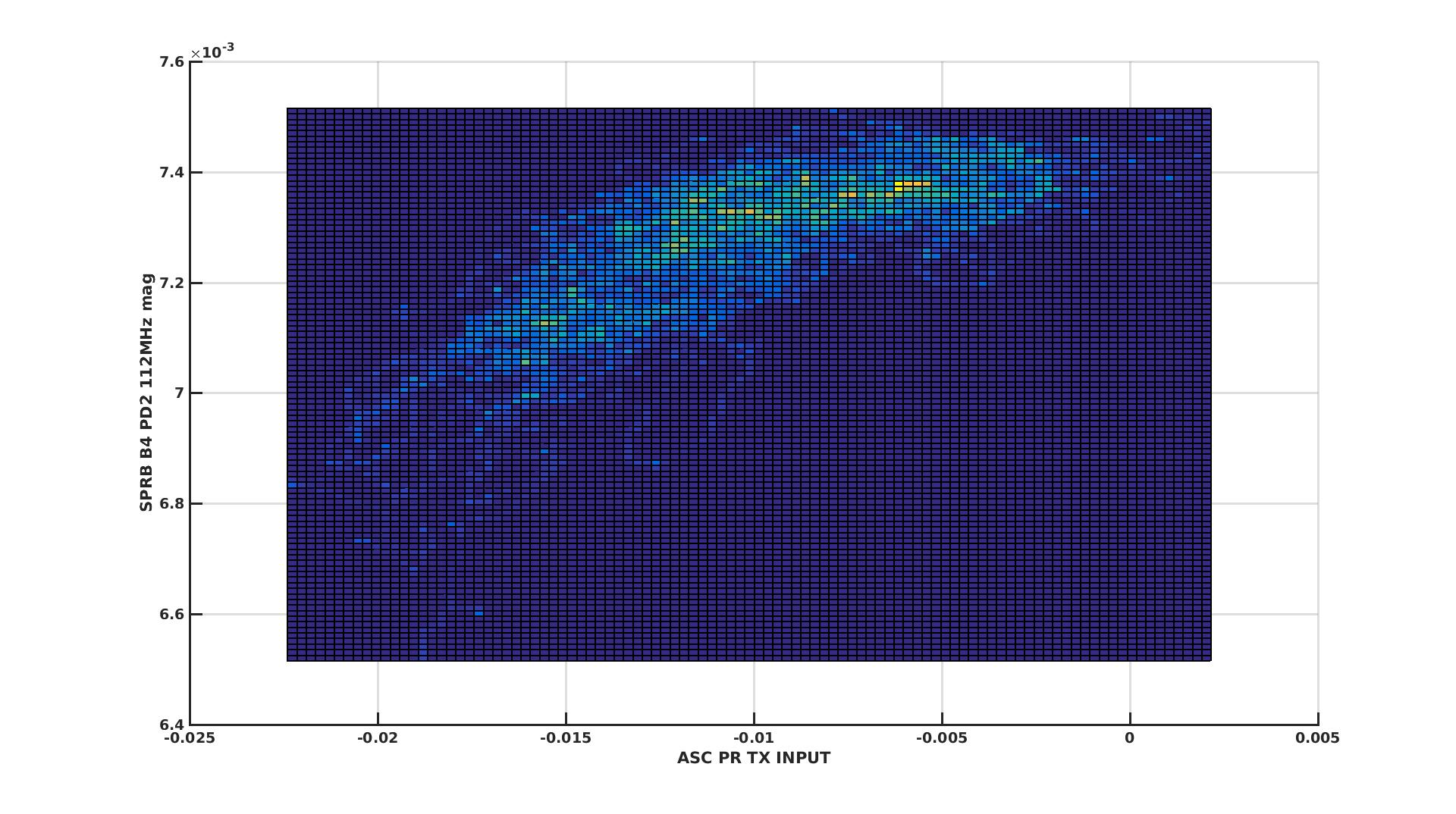
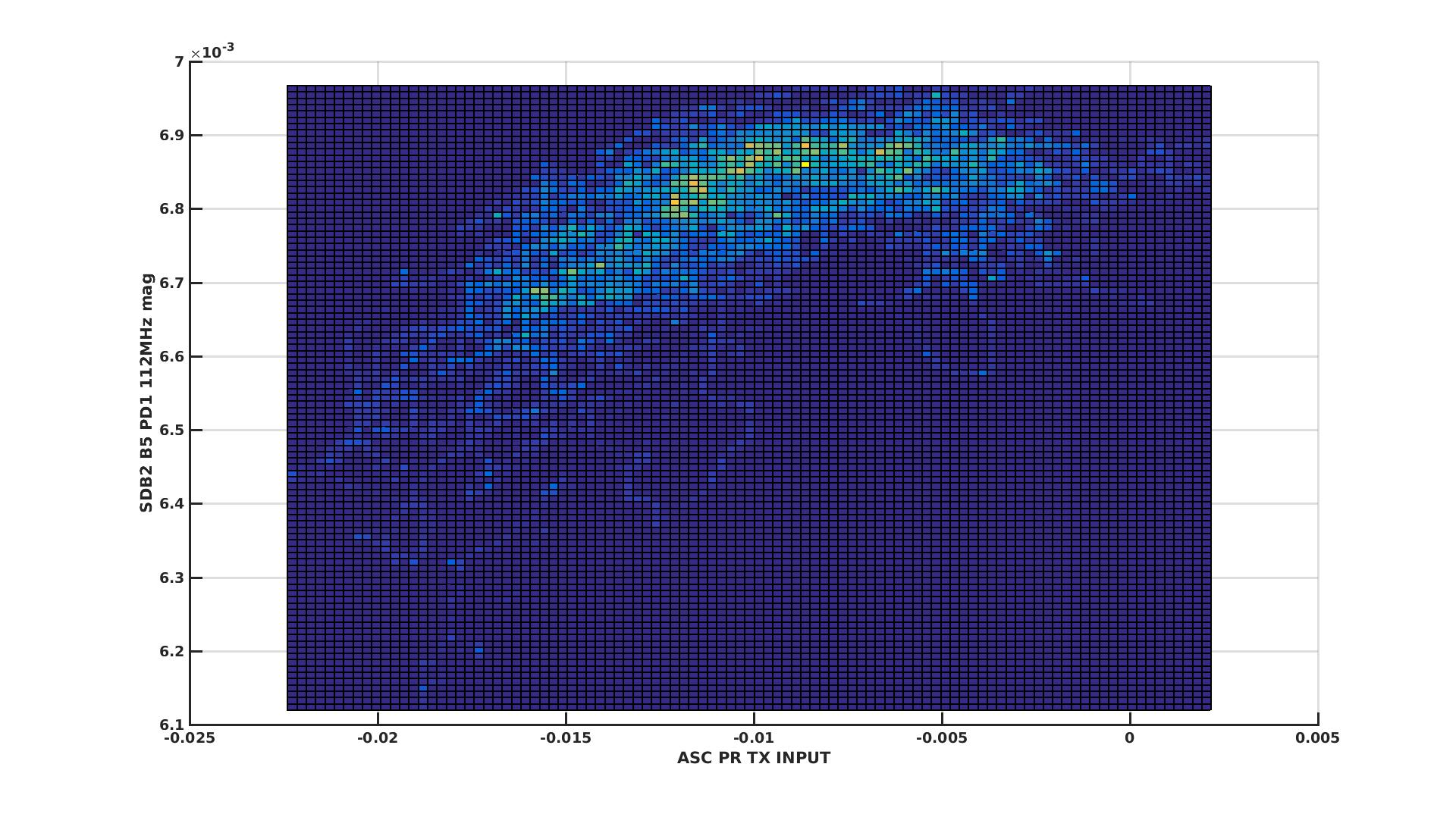
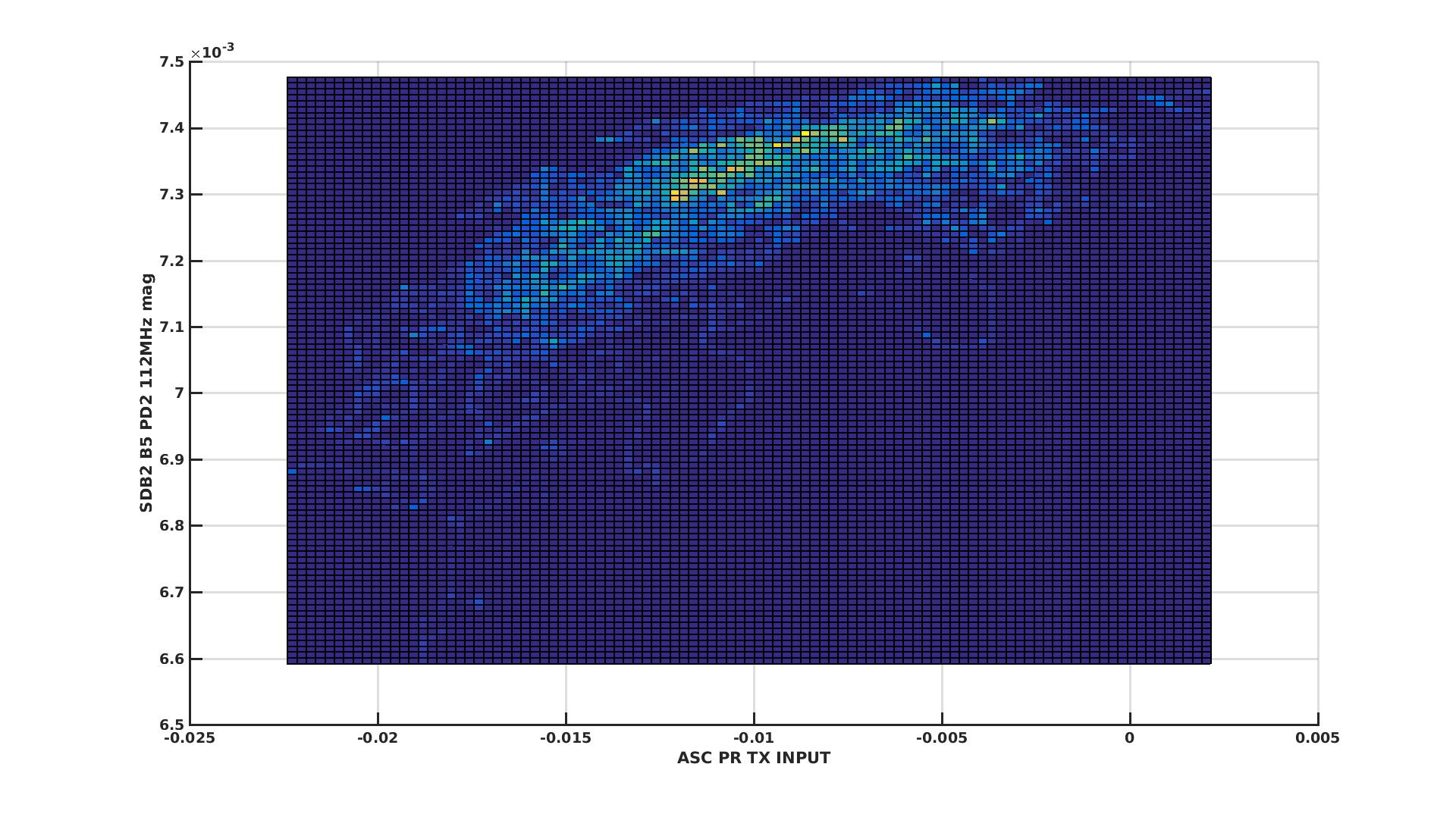
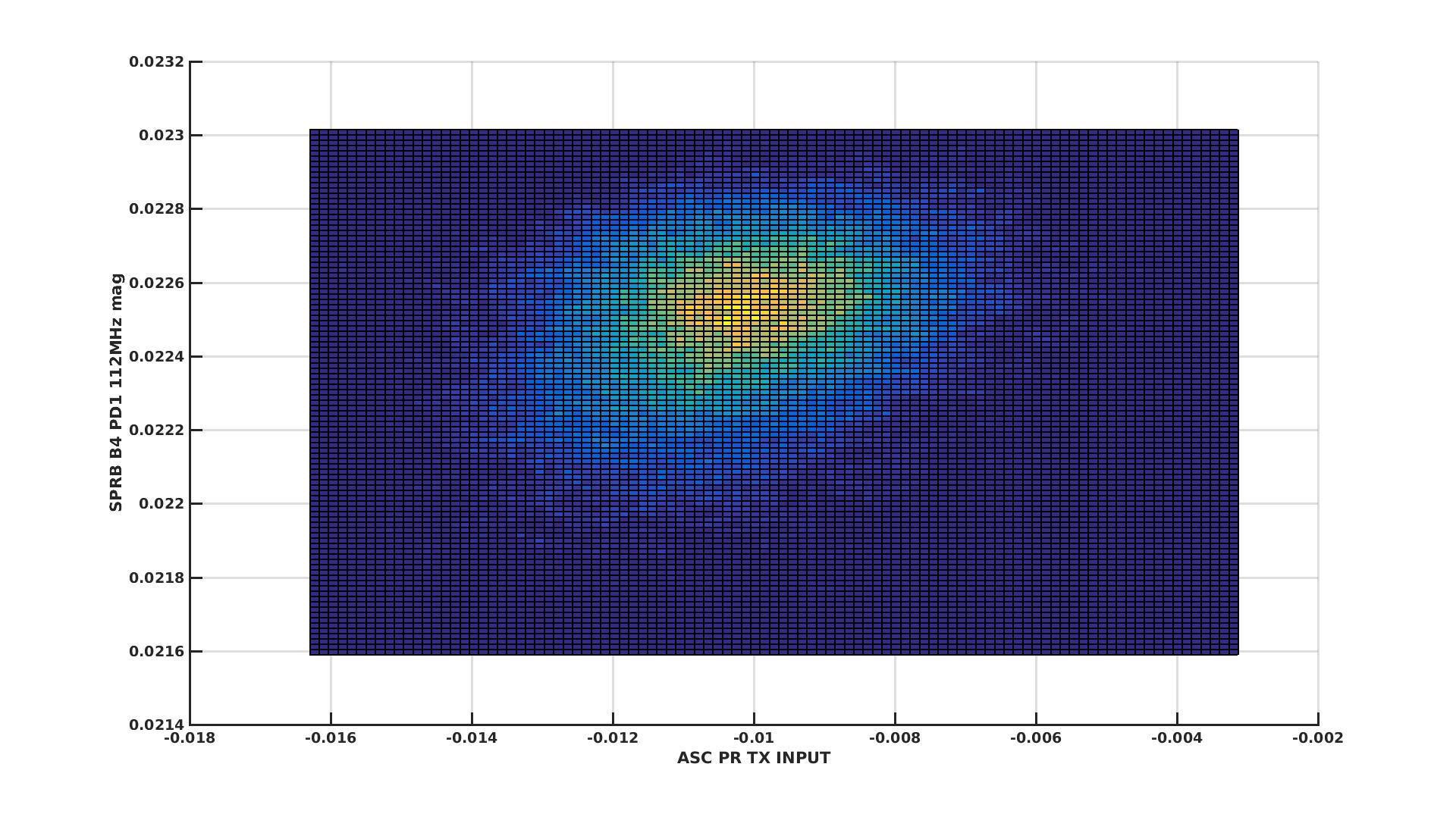
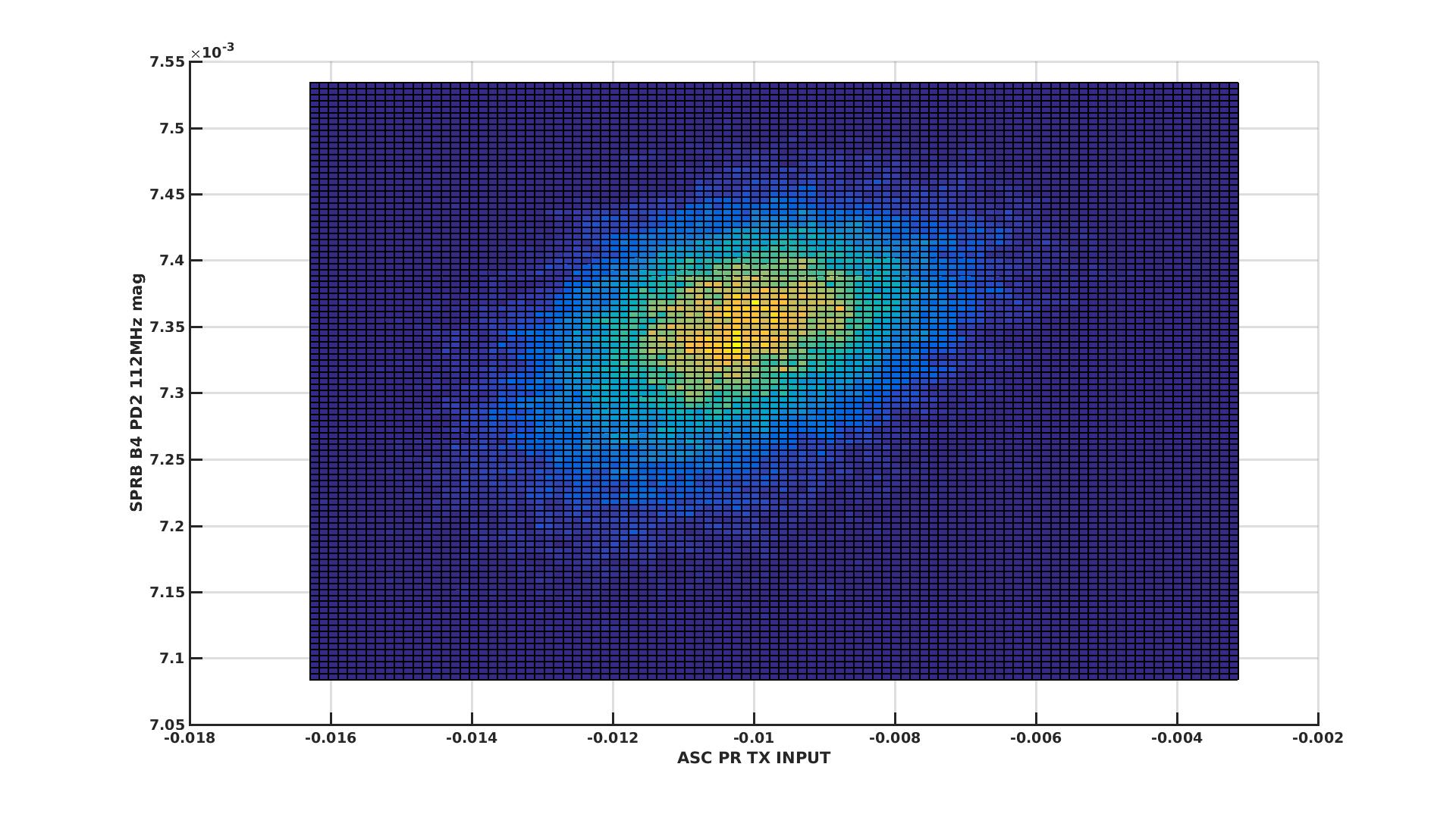
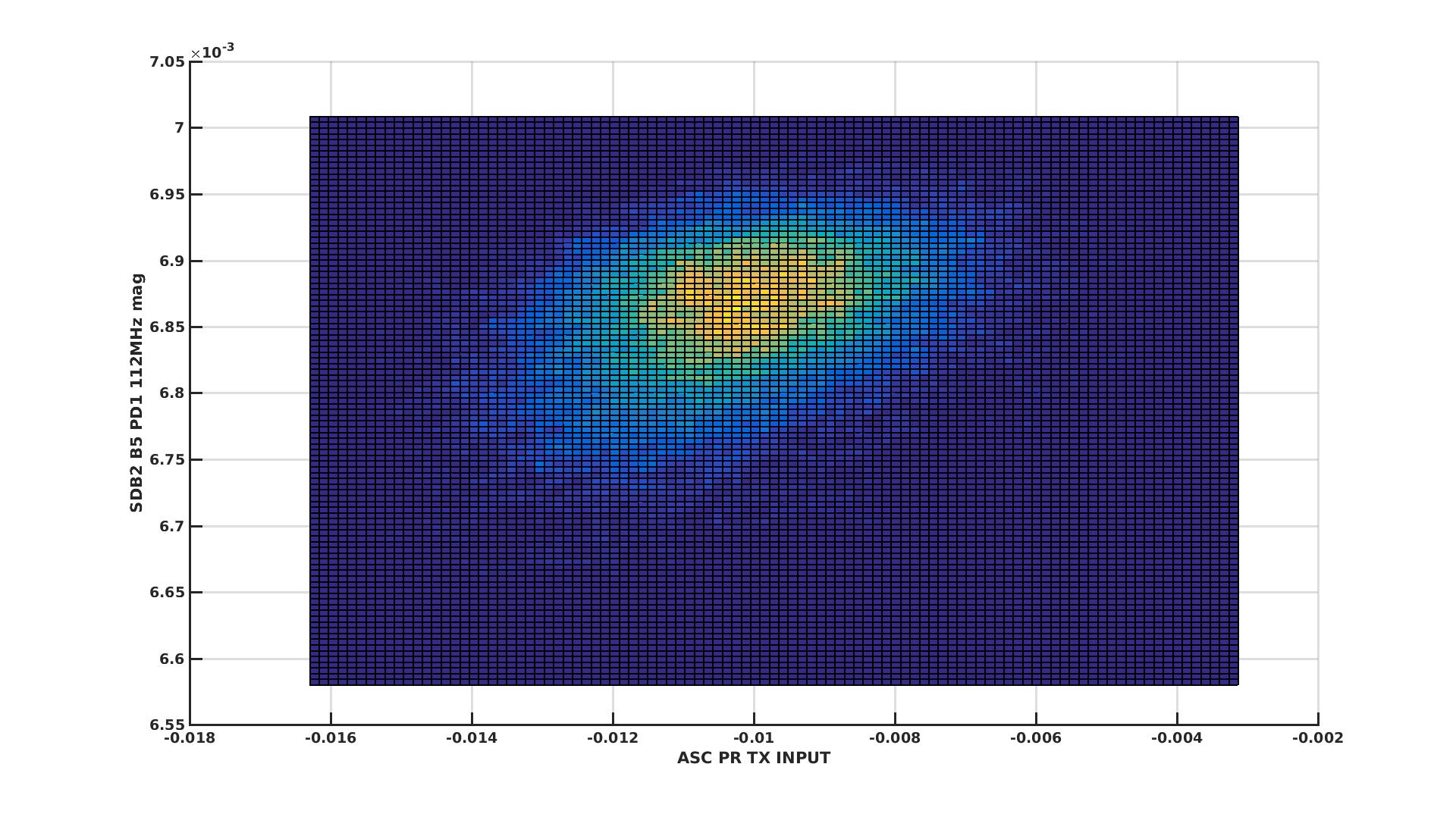
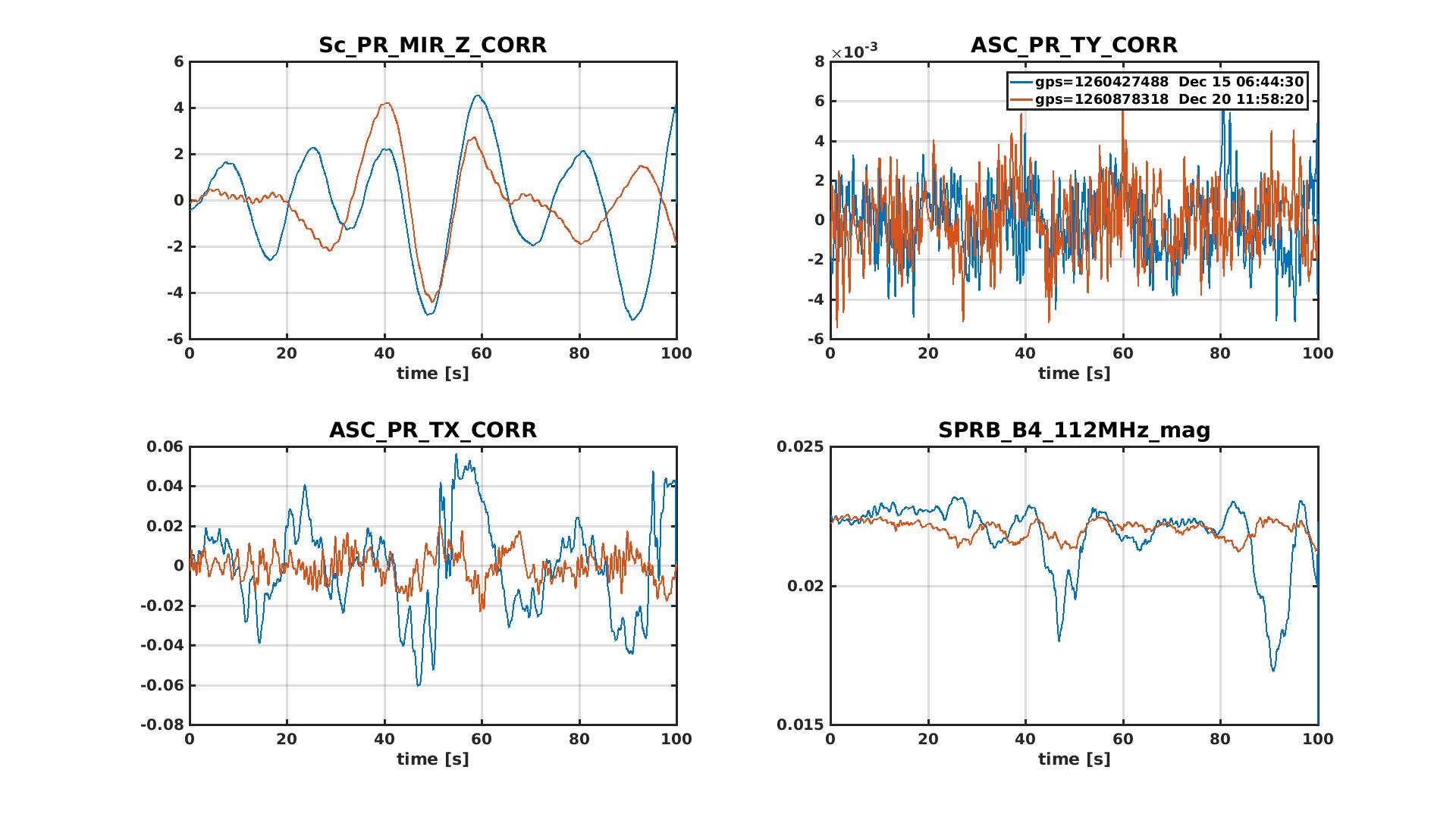
Another possible reason of this premature unlock is shown in fig 3,4,5,6: the sidebands were not oscillating around the maximum level (all the four PD on B4 and B5 say the same thing), indicating that the alignment working point was not optimal. This fact was more or less visible on the signals even before the earthquake, in quiet condition (fig 7,8,9,10), although pyAA had just finished its work of AA optimization (fig 11). To be honest, the bad state of the sidebands is well visible also in a time domain rough plot. Maybe pyAAtuning needs to be tuned.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}