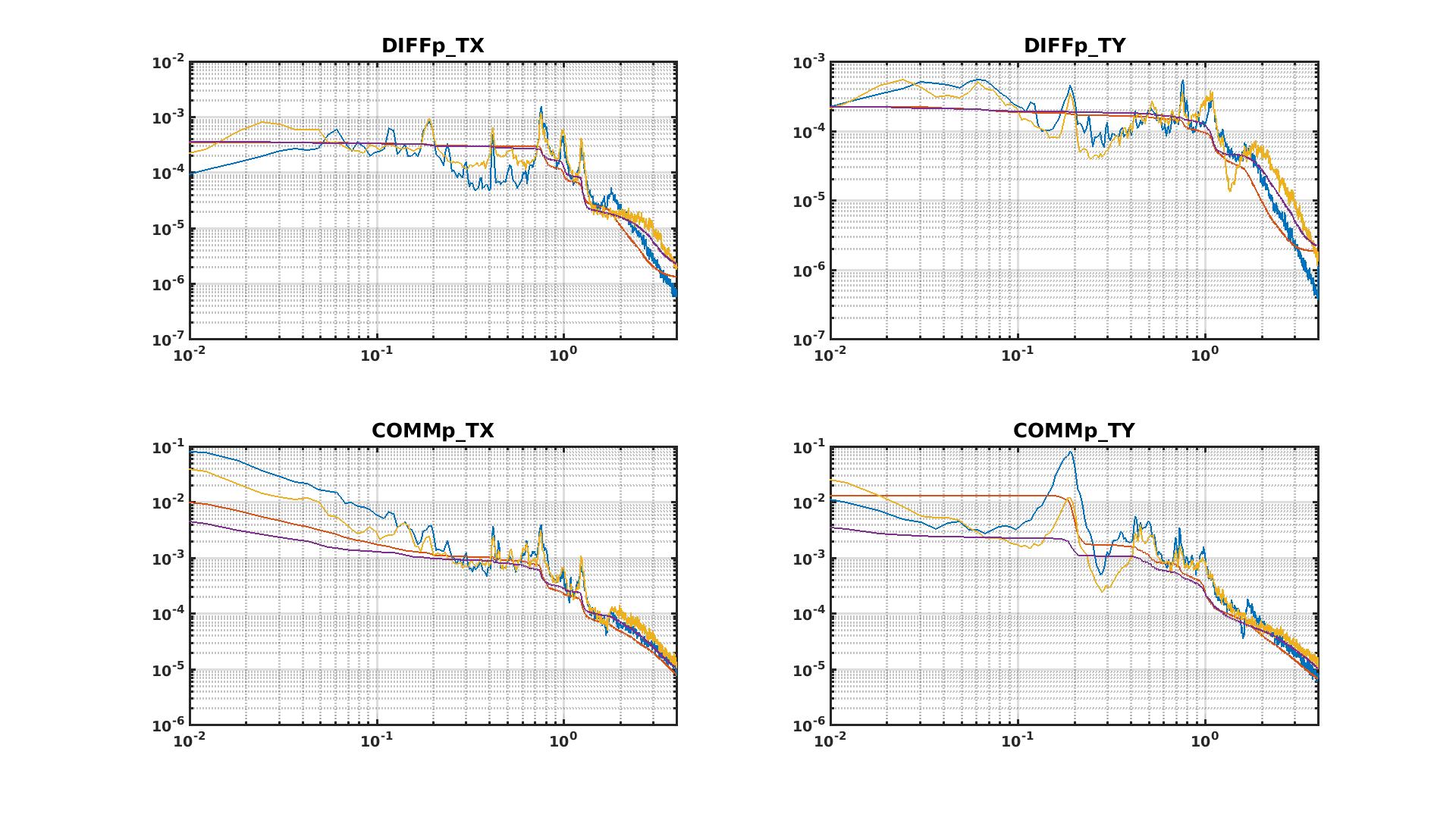
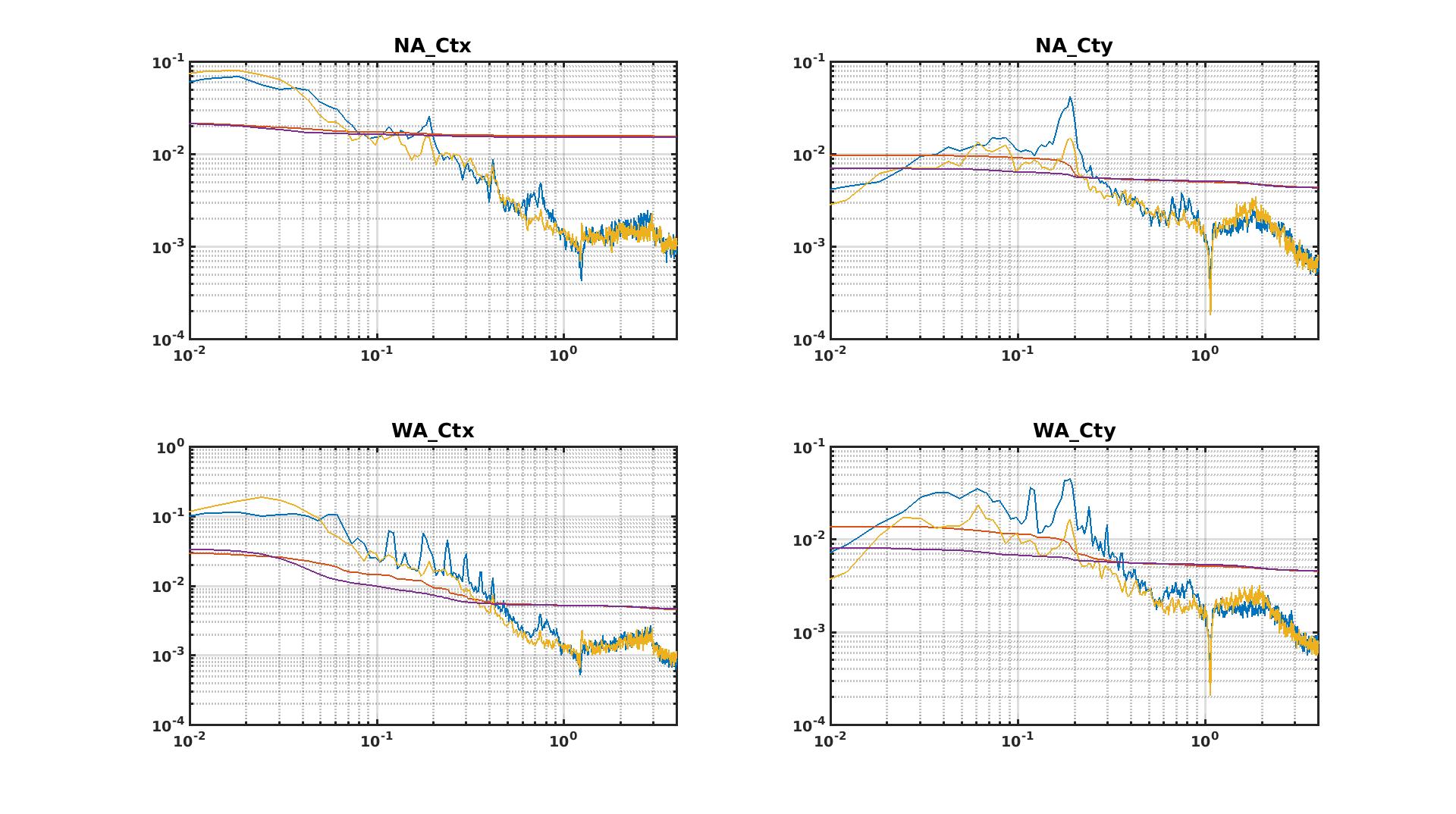
An activity started a couple of week ago, has come to a conclusion: the arm angular control filters currently running seems to meet expectations. The new controls are supposed to have about the same accuracy, and it is like that (fig 1, fig 2). The main difference visible in the plots regards a big peak at 200 mHz in COMMp_TY, and partially in NAm WAm (but it is just a coupling with COMMp. It is not due to a worsening of the control, but to an external problem, which will be expained later.
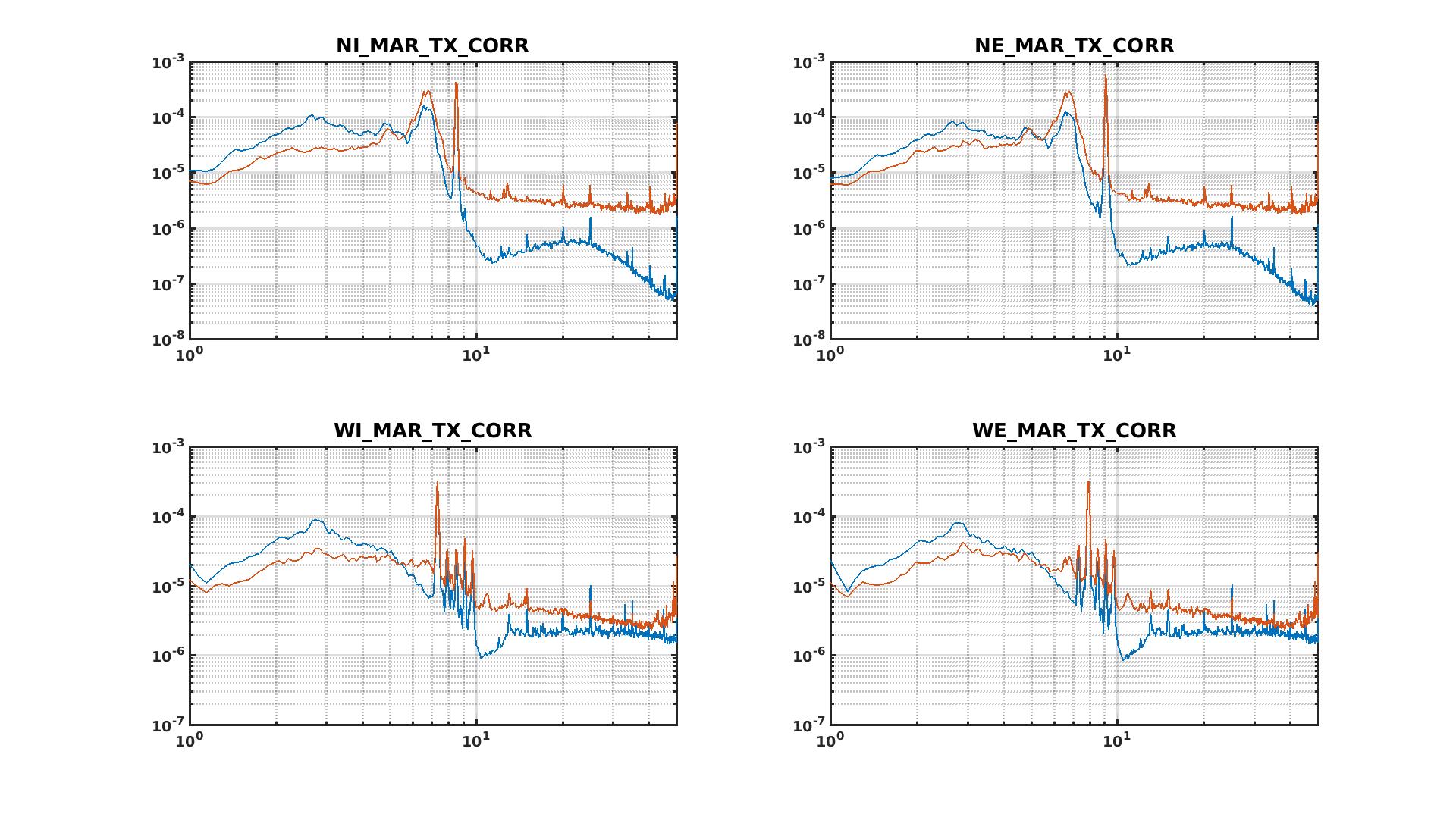
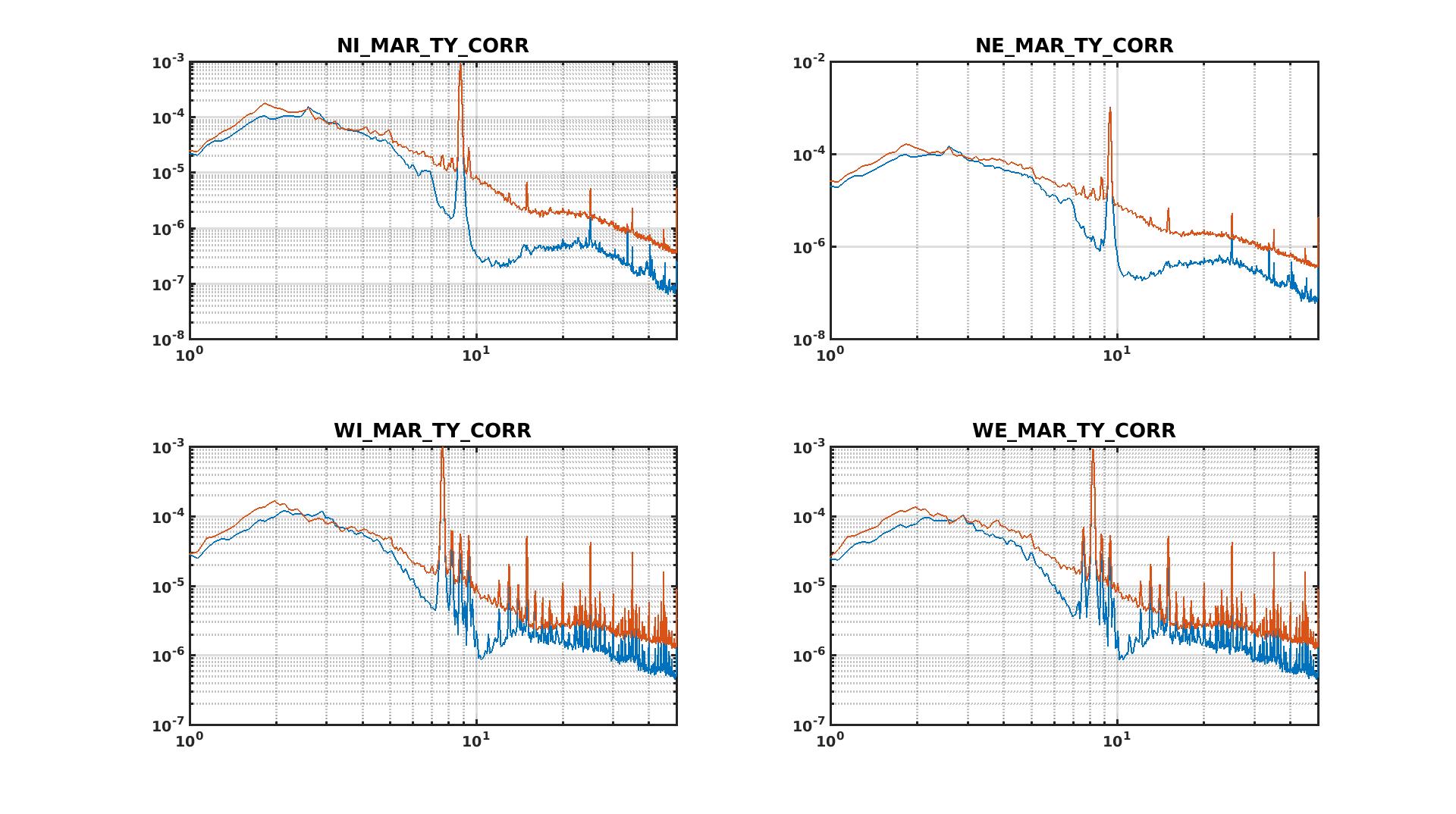
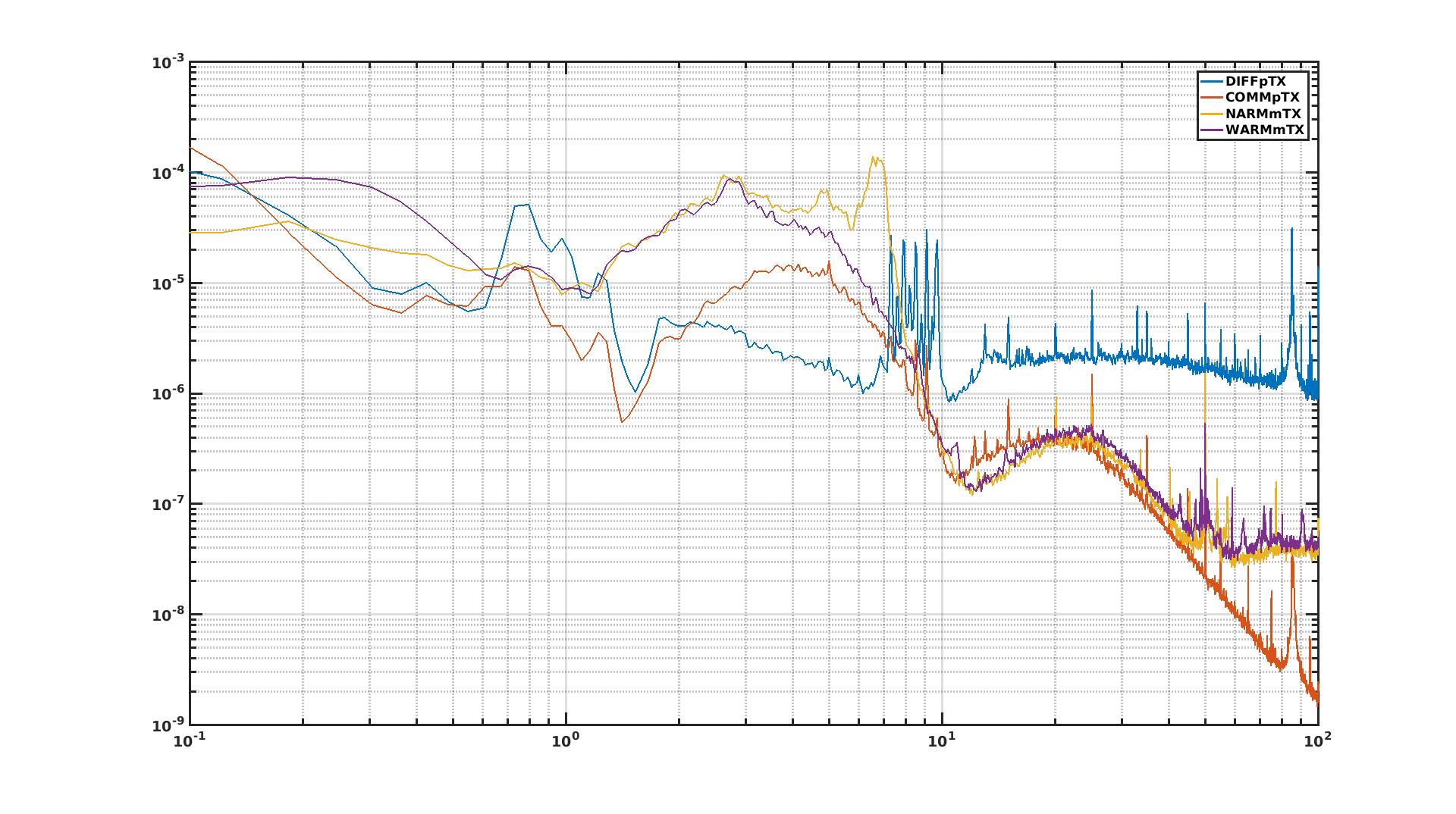
The new design has been developed in order to reduce the control noise above 10 Hz, and a certain result has been achieved, as one can see in the control corrections (fig 3, fig 4). More in detail, the loops which do not need a big accuracy have been improved a lot, in terms of noise reduction. On the contrary, for DIFFp, which requires the best possible accuracy, the noise has been reduced just a little, and now it is dominant on the budget of the corrections on each mirror (fig 5, fig 6).
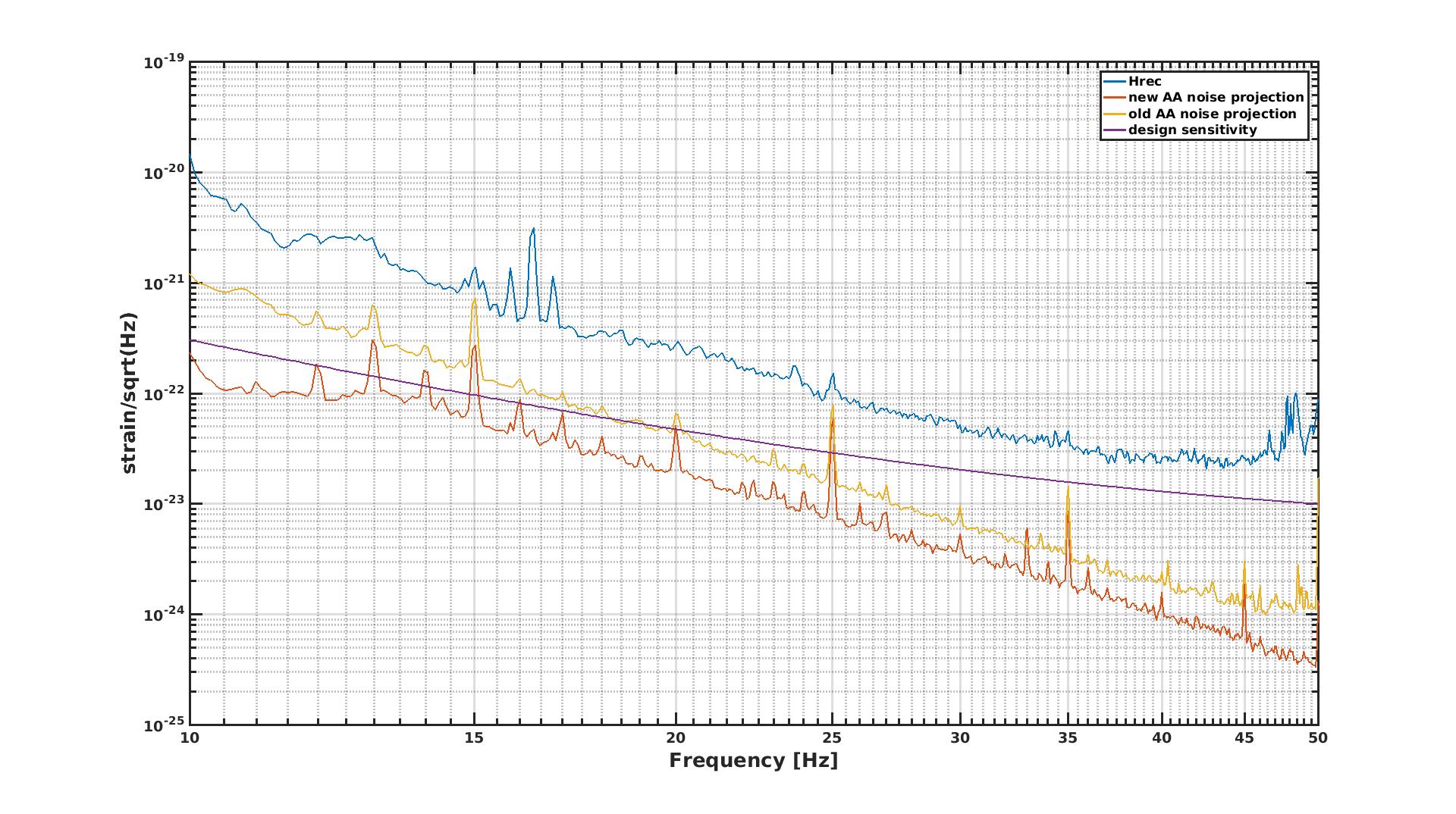
The current projection of the total Arm noise on h is shown in fig 7.
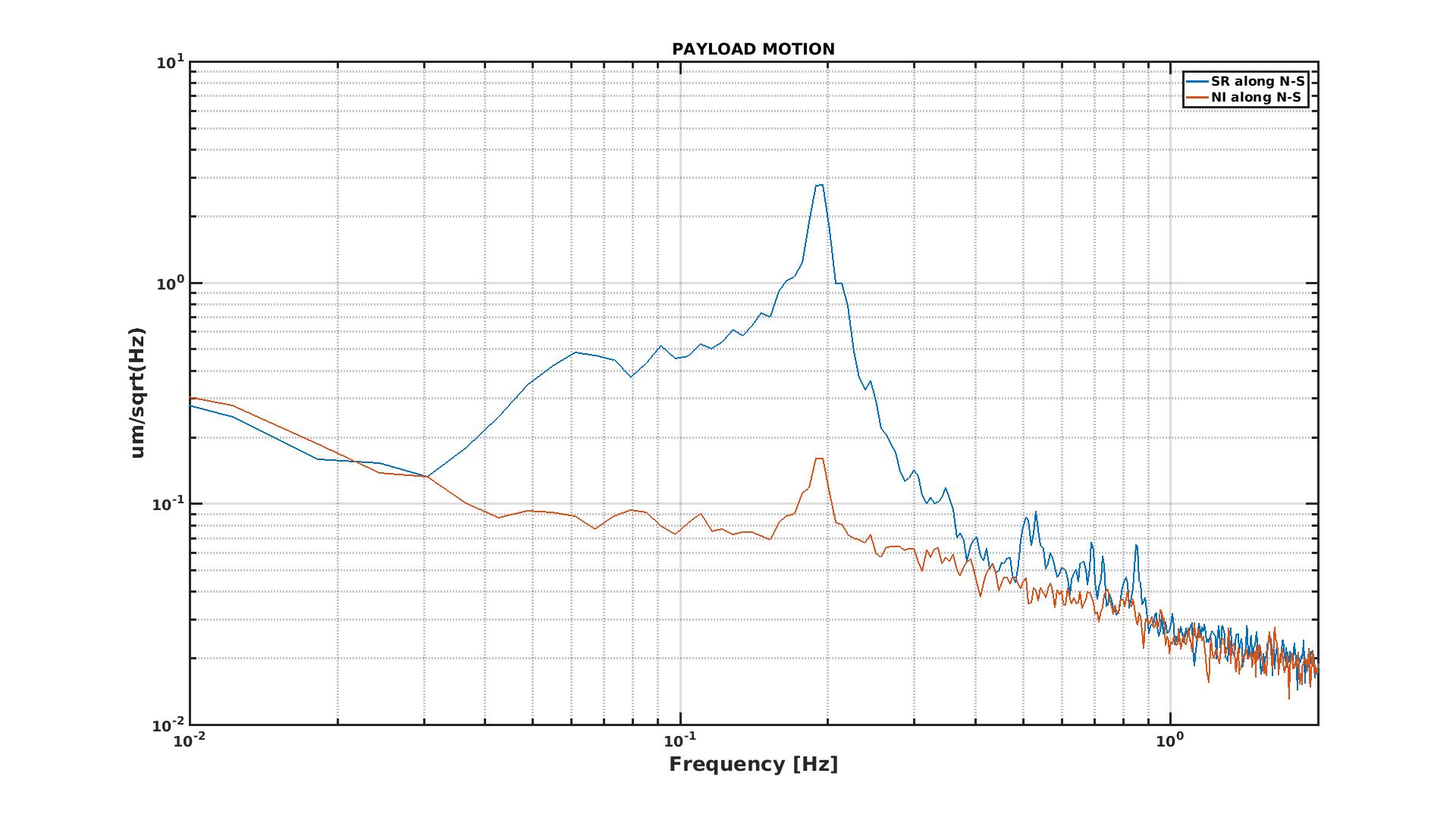
The problem of COMMp_TY is in fact a problem of SR longitudinal control. In fig 8 the motion of SR suspension, measured at the level of F7, is compared to a the same dof of NI. SR motion produces a steering of the beam out of the ITF, visible on COMMp_TY sensor. Fig 9 shows the coherence between the two signals.
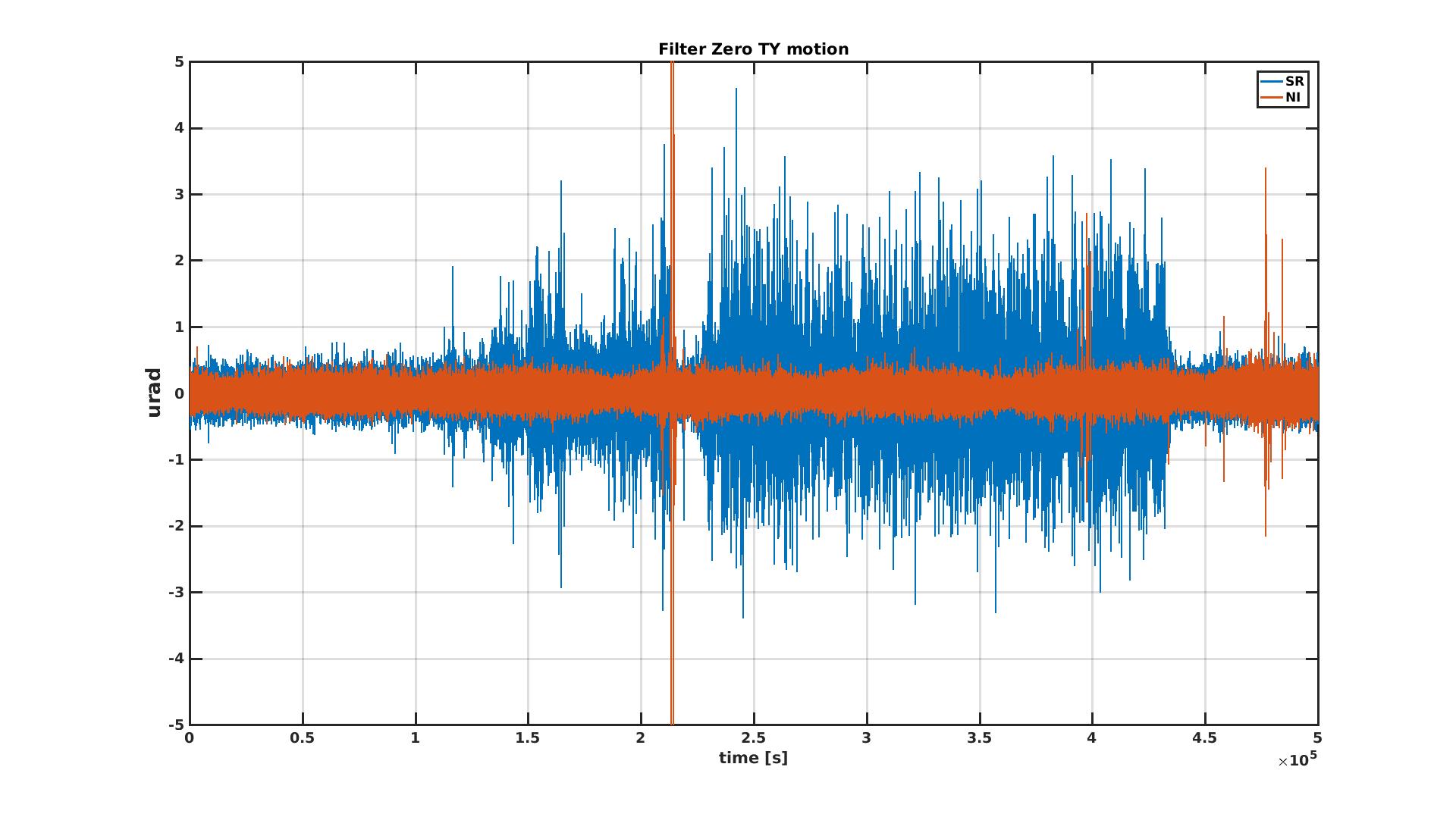
SR problem is not always there: sometimes the suspension is quiet as the others (fig 10). It is going like that since the beginning of the commissining, but a deep investigation has never been done.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}