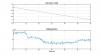
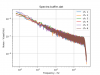
In order to improve the accuracy of DIFFp_TY, a refinement of NE and WE marionette longitudinal actuator balancing has been performed. For NE the adjustment went as usual: a slightly different coefficient has been implemented, and a small coupling zC to tyC has been removed. For WE, it was not possible to achieve a good balancing, due to a strange change of regime appearing at certain values (mainly positive) of correction (fig 1).
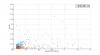
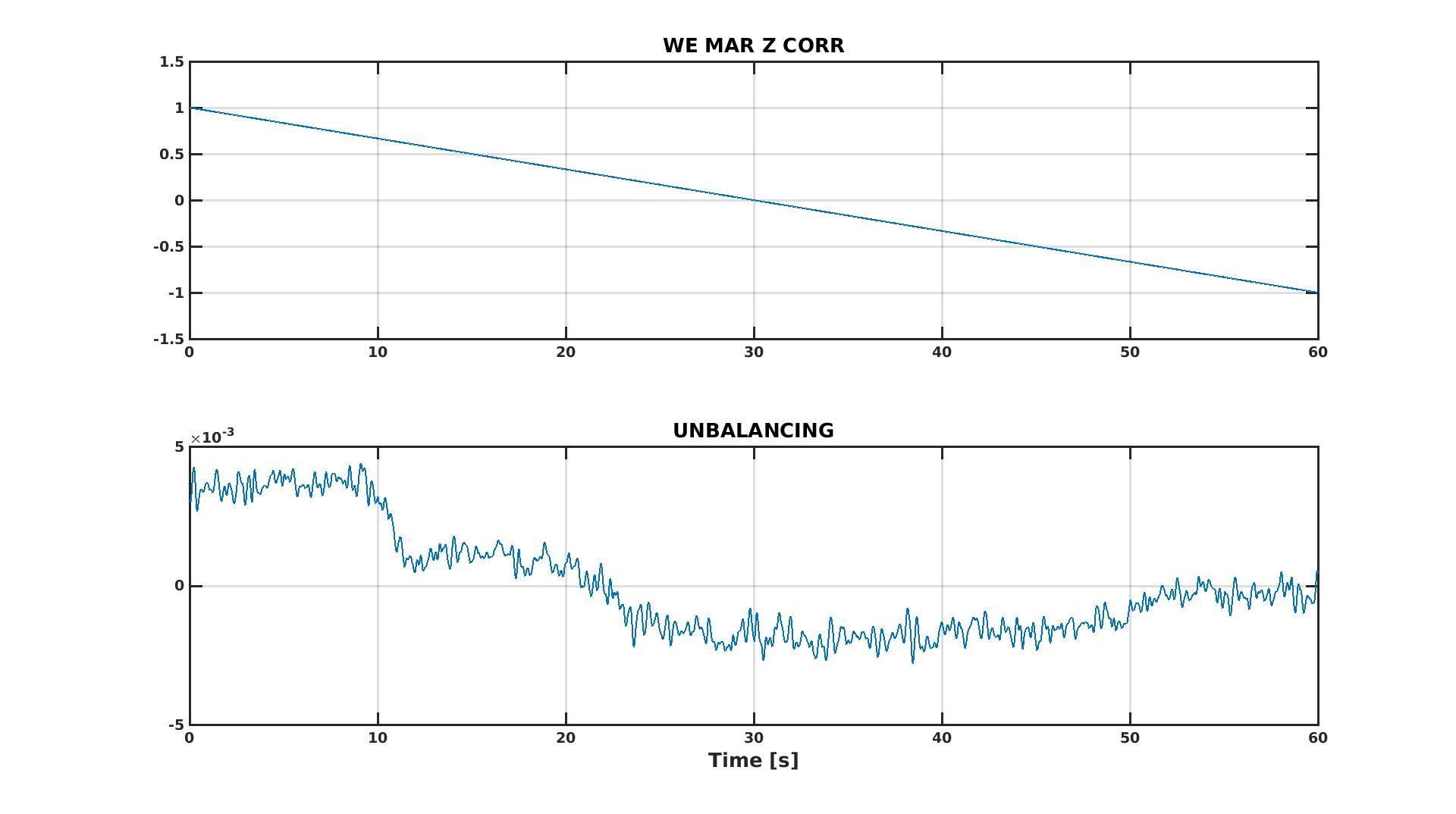
The effect is not negligible at all: analysing some data il LN3, it is clearly visible that a misalignment occurs each time WE_Z_CORR exceedes some positive level, while for the same absolute level, but negative, alignment is much more stable (fig 2).
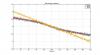
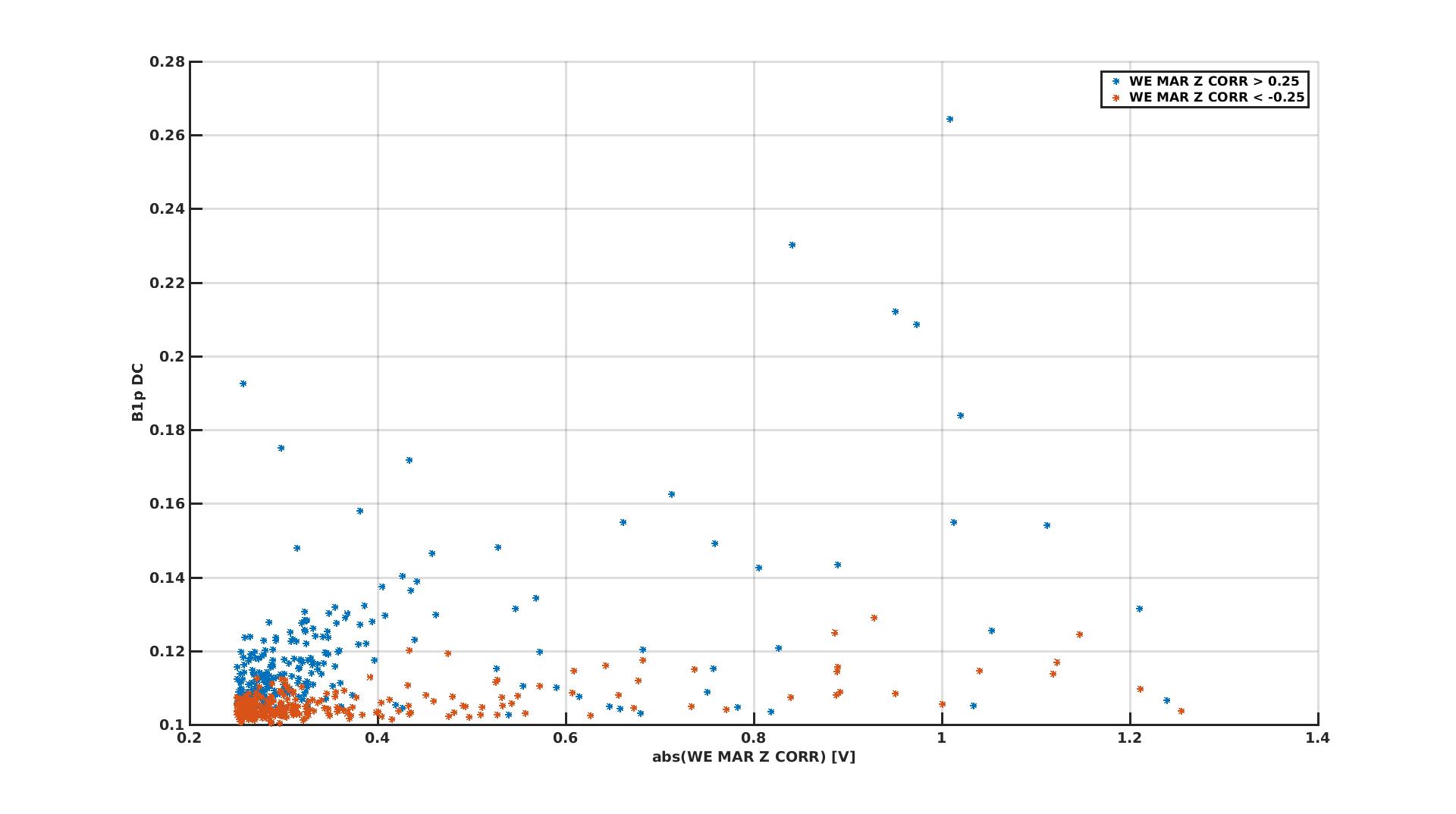
After an investigation on the hardware, it has been found that the origin of the problem is a strange non linear behaviour of the two coil driver channels used for marionette longitudinal acuators: comparing the output of them with respect to the output of the other channels of the same board, the result is in fig 3. The deviation from linearity is large, but the two responses are equal enough to produce an actuation almost balanced (but not enough for the ITF sensitivity to angular disturbances).
We decided to drive the marionette using two good channels, borrowed from the mirror actuation. So the current setup for WE payload longitudinal driving is the following:
- linear and balanced driving for marionette; to be checked if the gain in terms of um/V is the same;
- the mirror is driven using two coils instead of 4; the gain at the level of the output to the DAC has been doubled, so the gain of MIR_Z_CORR should be the same. The margin before the saturation is large, so there would be no impact on duty cycle.
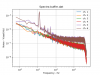
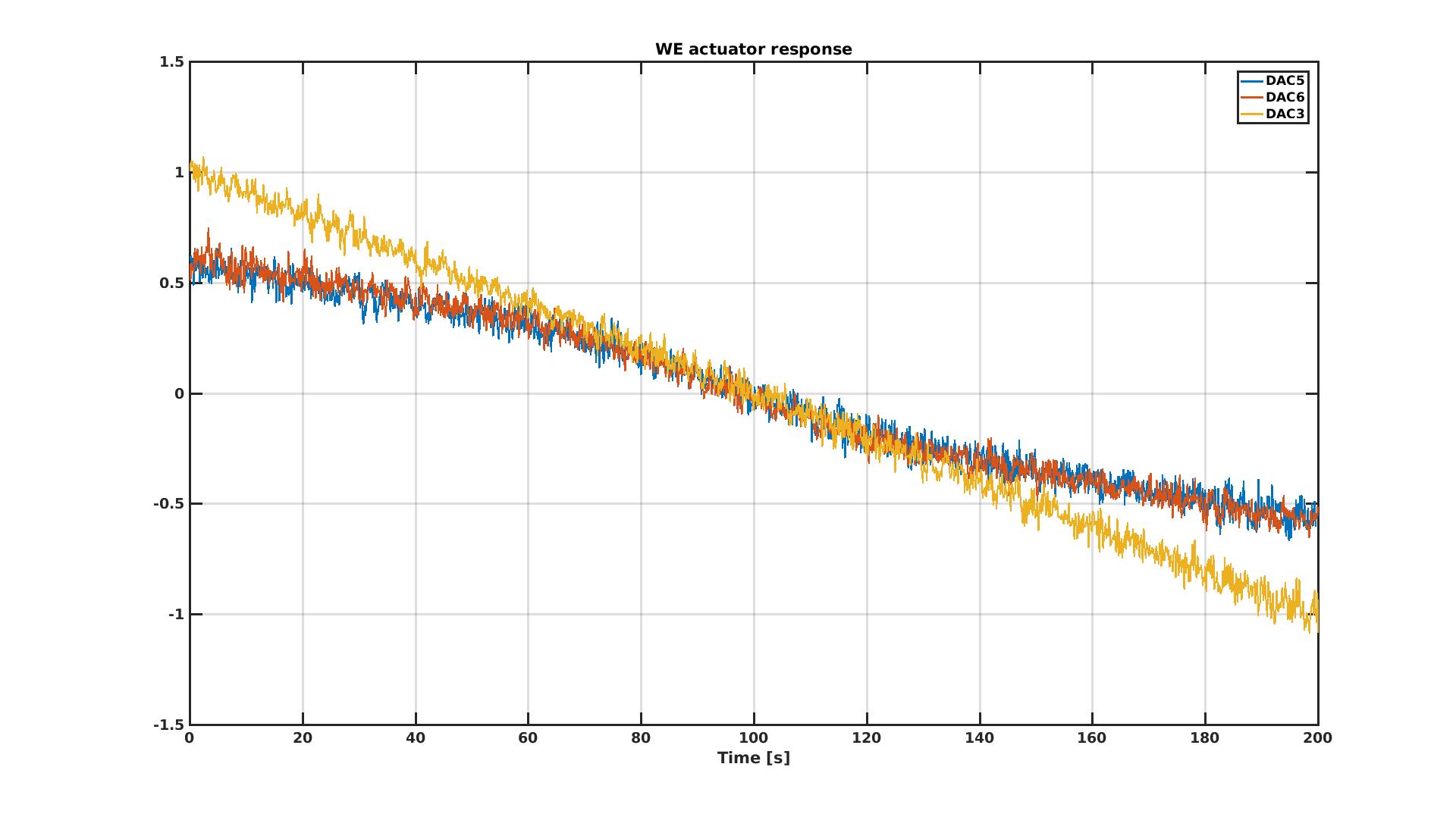
Fig 4: in the lock of this night the improvement of alignment stability is evident.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}