The mechanical lock of CARM is still not engaged, because it is too noisy. This means that the tidal control of the arms compesates only the differential tide, while the common tide is free and can change the cavity length by about 100 um in 6 hours. As SSFS in engaged, the IMC length is linked to CARM. A CARM fluctuation of 100 um produces about 5 um of IMC elongation, equivalent to about 2 Hz of modulation frequency mistuning. In addition, the preliminary tuning of fModErr performed at each lock attempt can be inaccurate up to a couple of Hz. This is the reason why MICH noise is sometimes so high and can be so different from one lock to the other.
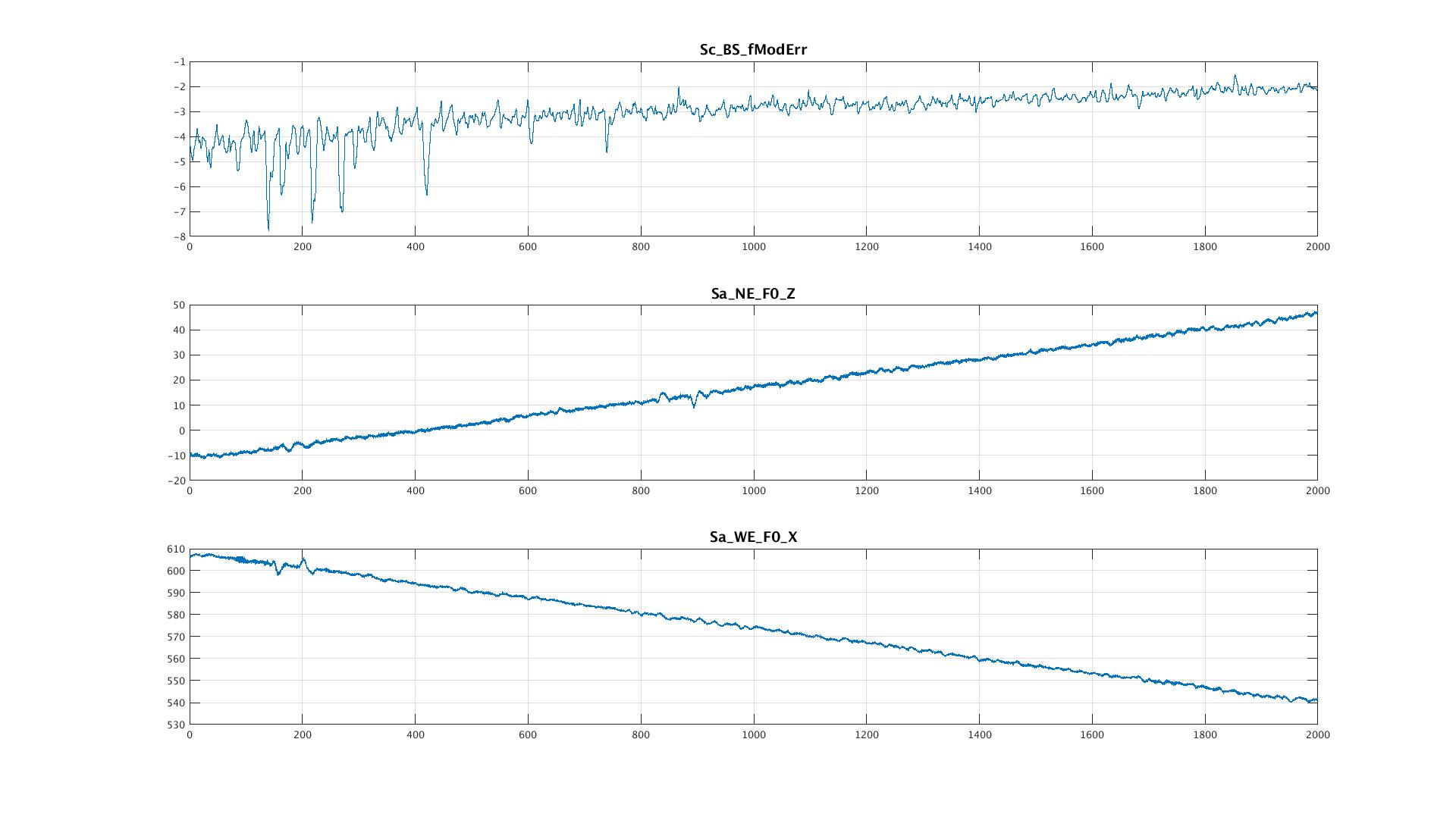
A measurement of fModErr in locked state has been implemented. It is based on the coupling of frequency noise to MICH noise when IMC length and modulation frequency are not well tuned, and it is computed in BS susp DSP demodulating MICH correction with respect to MC correction at 62.4 Hz (a typical line of frequency noise). Those signals have been chosed because they are already available on the susp DSP; doing it in ACL, it will possible to refine the computation using better signals.
The signal is now in loop for the tidal control, as CARM error signal. The loop is engaged at the end of lock acquisition.
{kind=link}