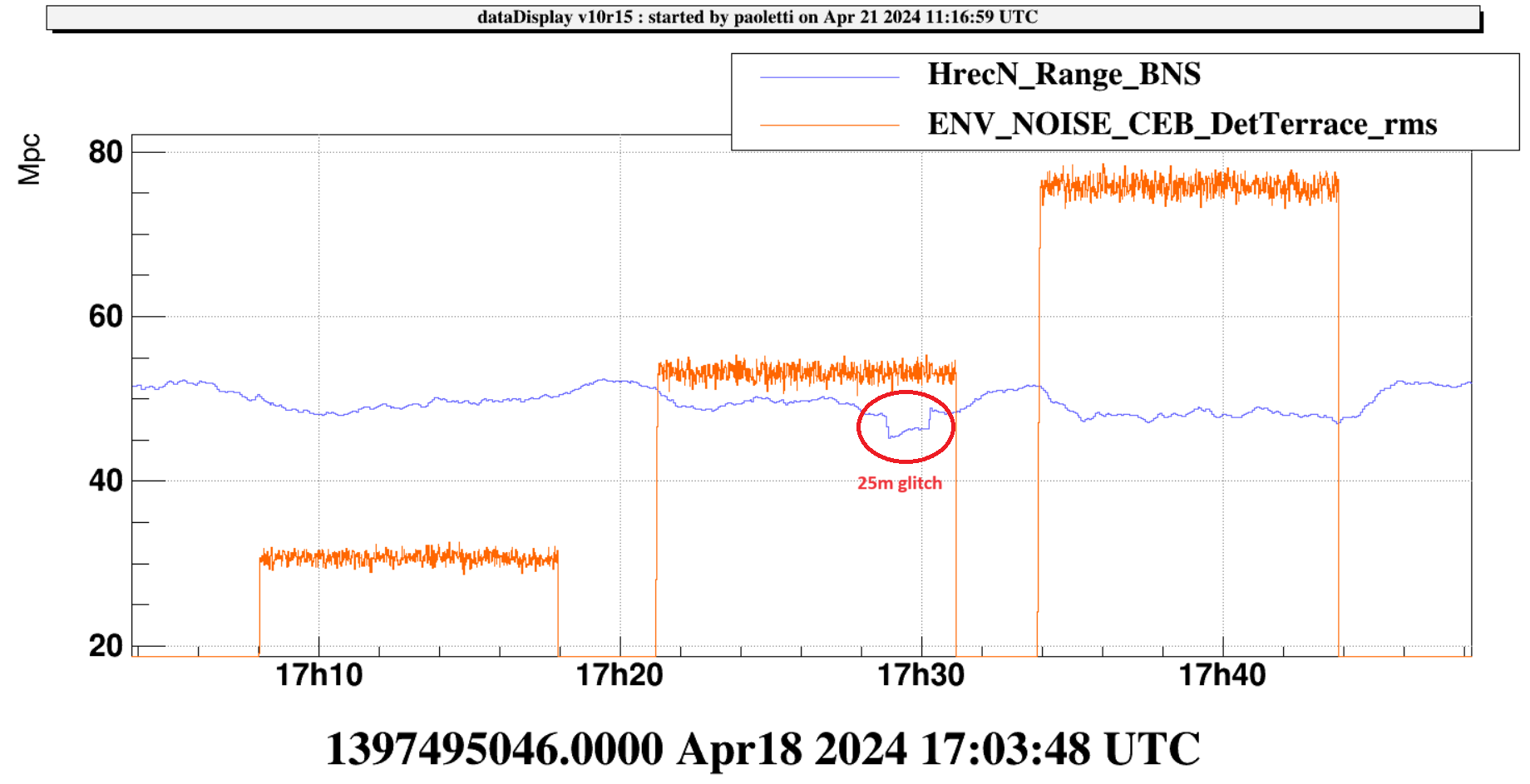
Yesterday some interesting data in windy condition has been acquired. It is useful to analyse those data because the IT was in a good state just before the wind, then there was a reduction of range during the windy condition, then the wind calmed down and the range recovered a higher level (fig 1). Everything happenend during the same lock, while other relevant parameter were reasonaby stable: this is the perfect condition to deduce what is the effect of the wind and what needs to be improved in order to keep the same sensitivity.
In windy condition, a clear worsening of the CMRF is visible. The optical gain has a small drop, but this seems not so relevant and not totally correlated to the wind speed (fig 1).
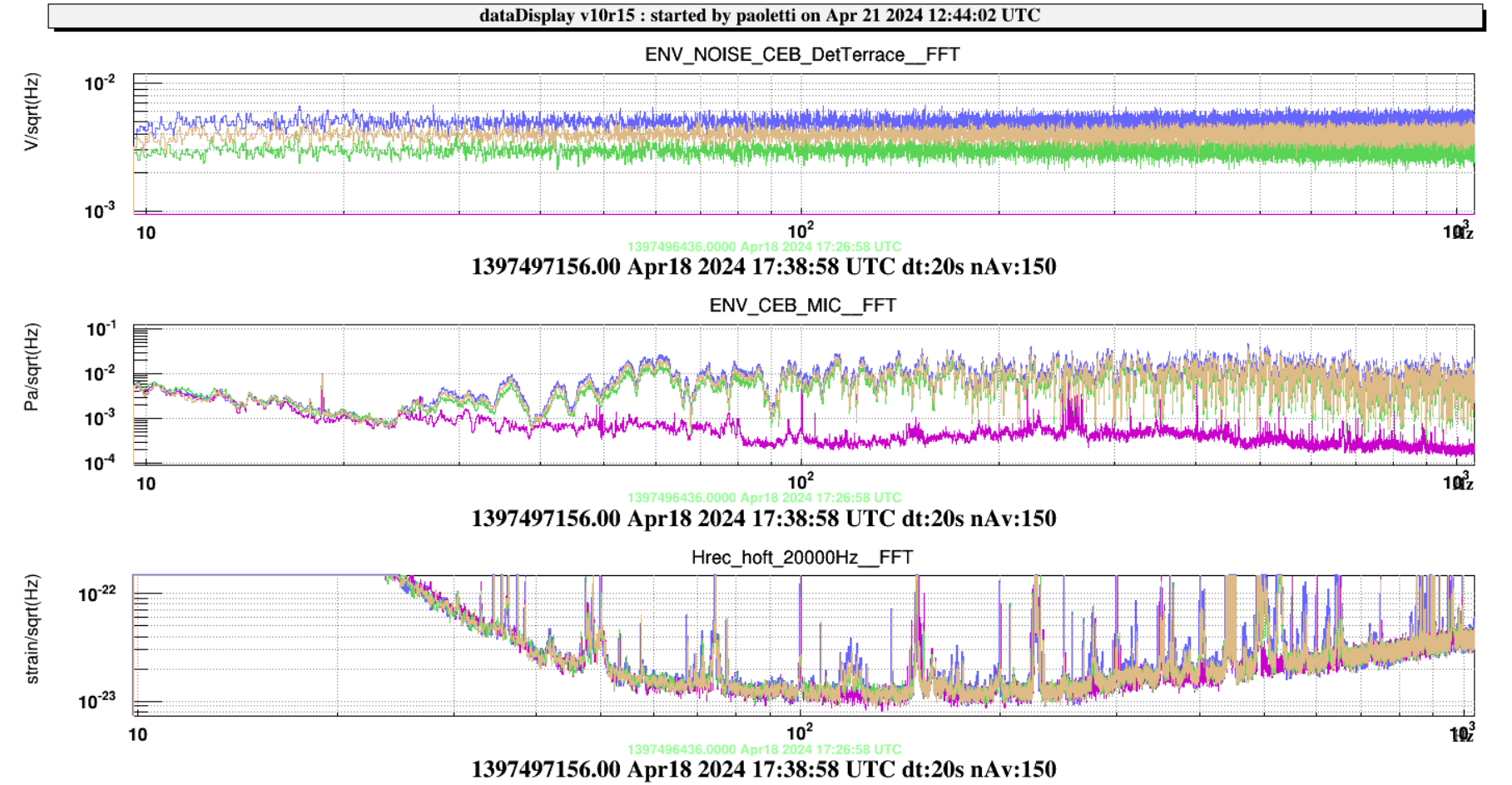
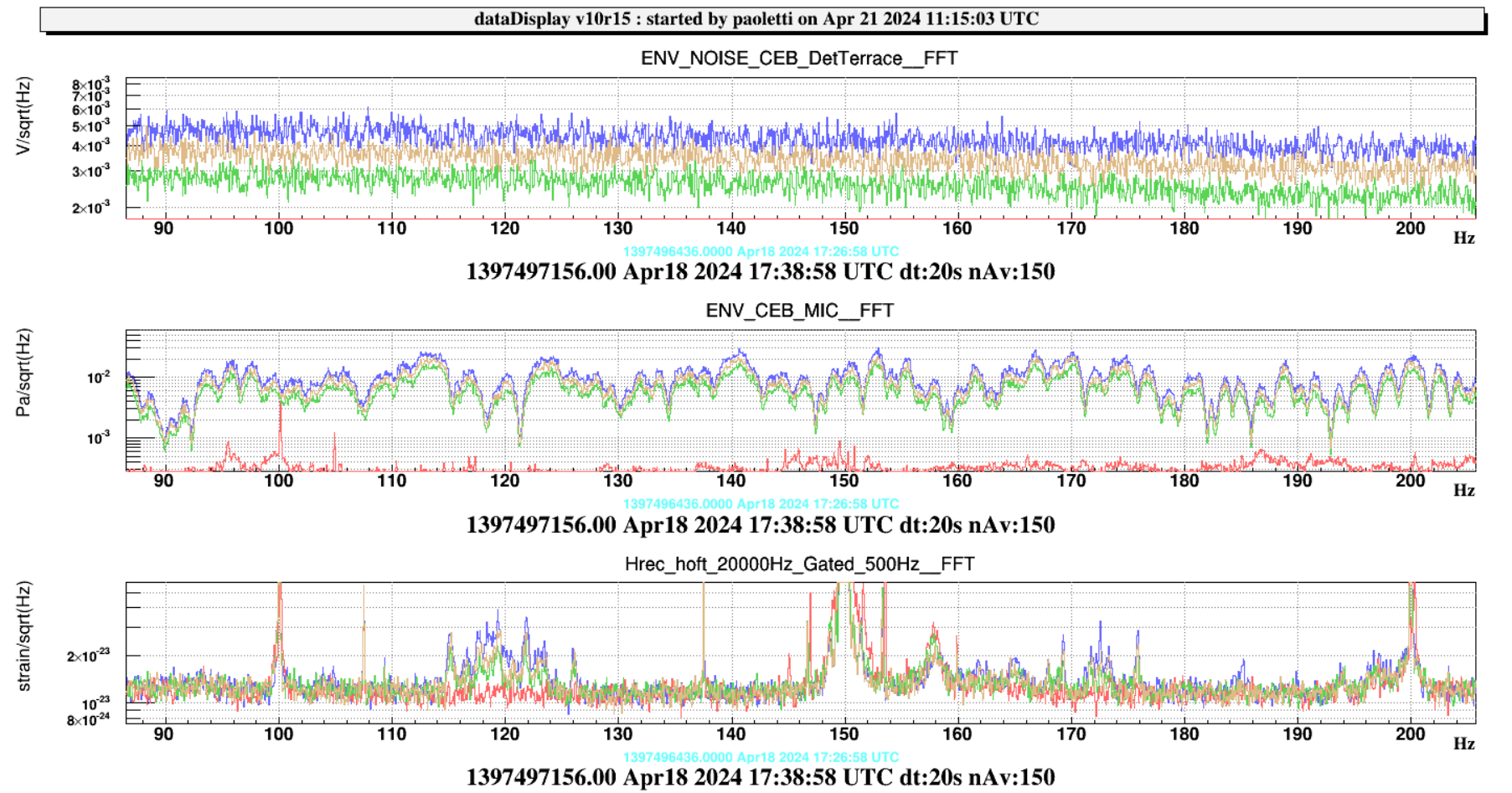
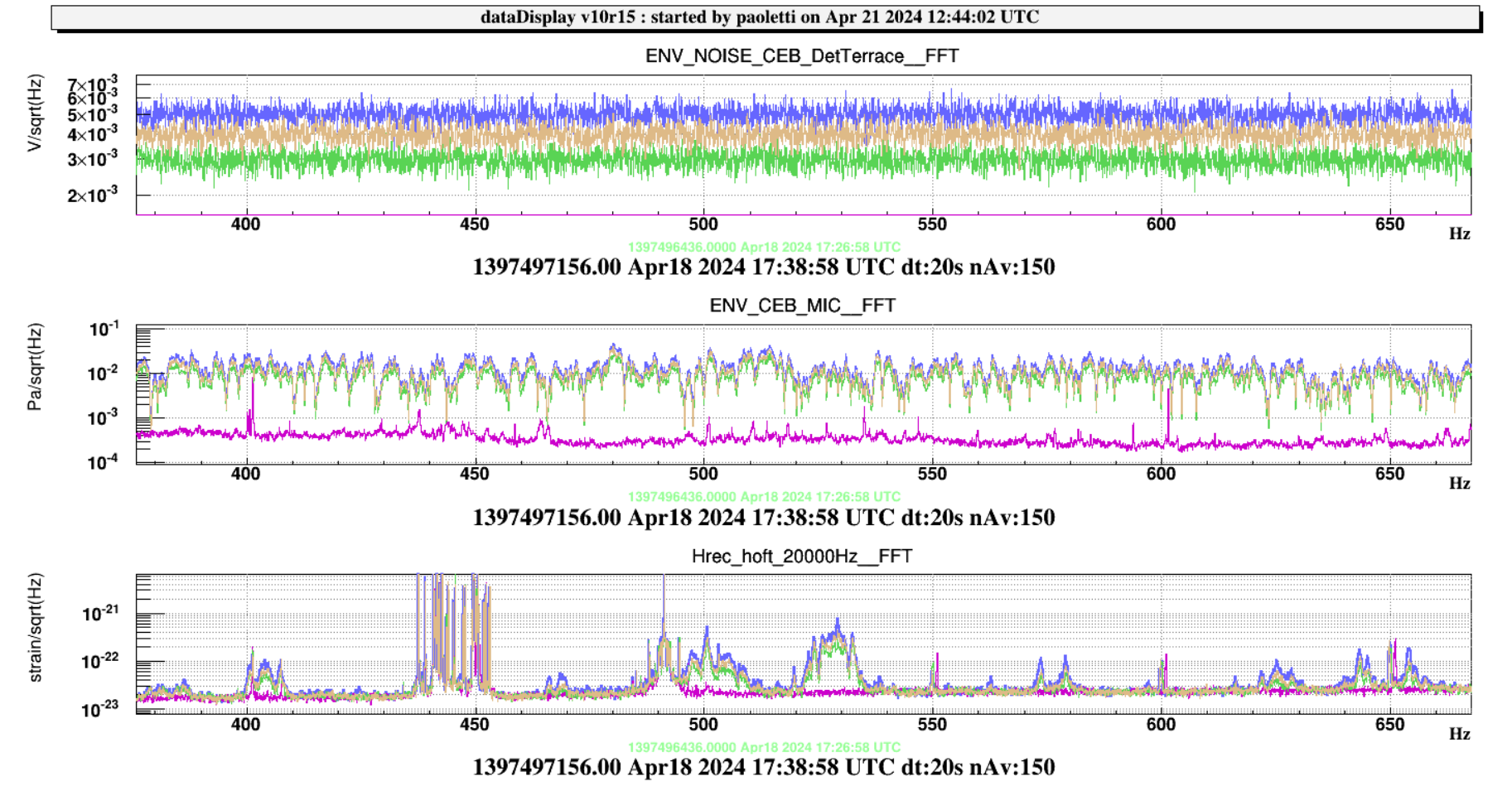
A comparison of hrec in the two conditions (fig 2) says that the additional noise caused by the wind is not simply a worsening of the mystery noise: there is for sure some flatter component visible up to 250 Hz, which could be better explained as frequency noise (the noise budget needs to be checked).
The working point, as it can be seen in the relevant ITF powers, seems not affected that much (fig 3). Only B1p is a bit disturbed, but this is more clear looking at the spectrum (fig 4).
There are a lot of suspension, alignment and correction signals disturbed by the wind: a small set of signals is shown from fig 5 to fig 8, both in time domain and frequency domain. Concerning the effect on alignment, we can just say that yaw seems more disturbed than pitch. This is reasonably correlated to the fact that the first effect of he wind is an increased horizontal motion of the suspension, because the wind creates environmental tilt at low frequency (< 0.1 Hz) and disturbes the accelerometers, involved in the suspension horizontal control. The low frequency horizontal motion can disturb the yaw control in three ways:
1) the correction on the marionettes needed to compensate the slow horizontal motion can make yaw noise because of not perfect balancing of the actuation;
2) the horizontal motion can be coupled to the local sensors of yaw dofs, some of which are in loop also in science mode.
3) the horizontal motion of some optics (PR, SR, benches) can generate horizontal tilt of the beams.
Pitch dofs are generally affected by seismic noise and suspension motion, but more in the region of the suspension resonances (> 0.2 Hz), where pendulm modes are naturally coupled to pitch motion. Microseism due to sea waves, more than wind, is the main offender for pitch motion.
Going back to the possible source of range degradation, the guess that it could be due to an unstable CMRF indicates BS_TY as a possible cause. We know that this is the angular dof better coupled to CMRF: in fact we change its set point in order to put at zero the CMRF mean value.
From fig 9 one can see that there is a strong linear correlation between BT TY and CMRF fluctuations. There is also a certain correlation between BS MAR Z and TY correction (10), which means that some angular disturbance could come from MAR longitudinal actuation and it can be reduced by a better balancing of the actuation. The transfer function between the two channels (fig 11) is 1*10^-4, which is quite a small number: the coefficient in use for the balancing arrives to the fourth digit and it seems that the last one needs to be corrected by just one unit. We can do it and see what happens, but adding the fifth digit to be more precise probably is not really possible in a stable way.
Other improvements that can be tryed are:
1) increasing the loop gain at low frequency;
2) changing the balancing in the blending strategy between quadrant signal and optical lever.
We cannot even exclude that the excess BS TY motion is driven by other optical disturbances in the ITF, affecting in the end the quadrant used for AA control. Some commissioning activity is required, to be done step by step.

















































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}