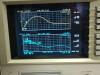
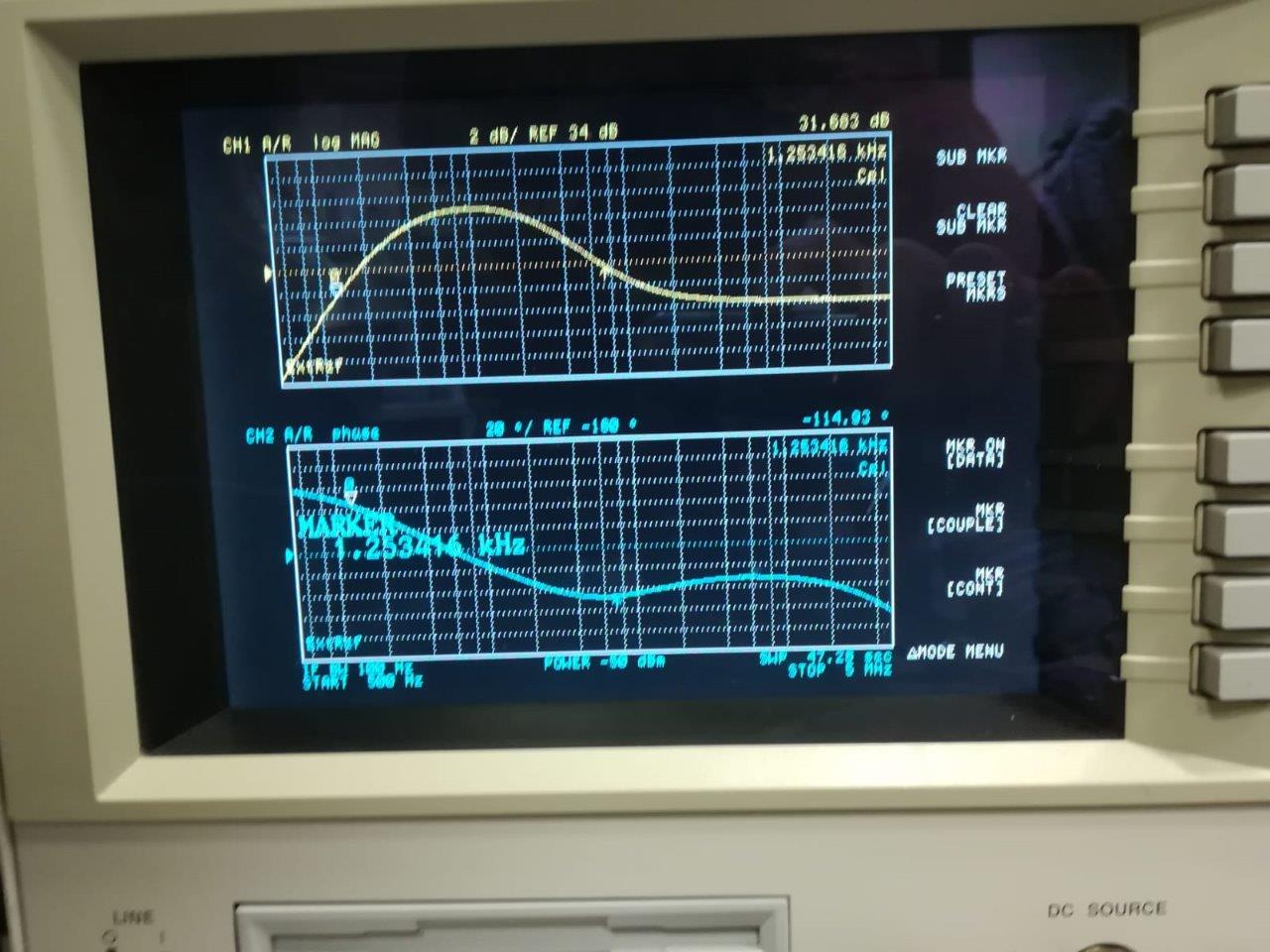
This morning we swapped again the videodriver and we installed a modified one with a new filter, whose zero is at 3 kHz (it was at 14 Hz before), in order to reduce the rms by avoiding to send EOM corrections at 50, 100 and 150 Hz. Its trasfer function is shown in the first plot.
The IMC is currently locking with an attenuation from 5 to 14 dB (until 7 dB it shows a loop oscillation @ 270 kHz), and we left it with 15 dB. Since by increasing the attenuation from 7 to 15 dB we lowered the general gain of the rampeauto, we then increased the EOM corrections thanks to the videodriver gain. The overall effect should be to release the piezo corrections.
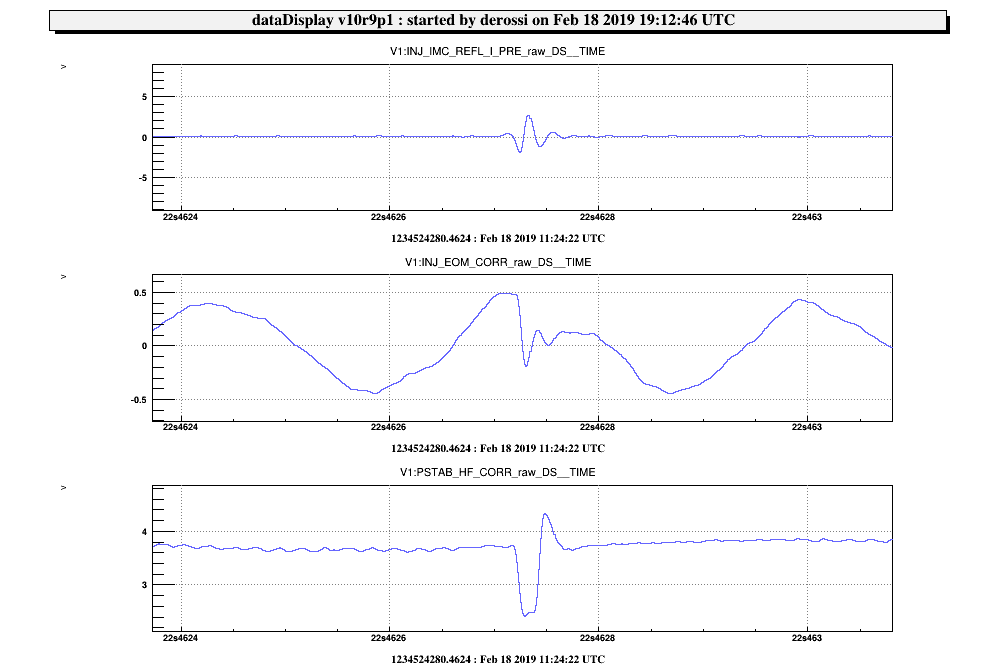
With this videodriver saturation is now occurring at 0.5 V rather than 0.4 V (an example is given in the 2nd plot), so that we gained a little bit in the actuation range.
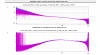
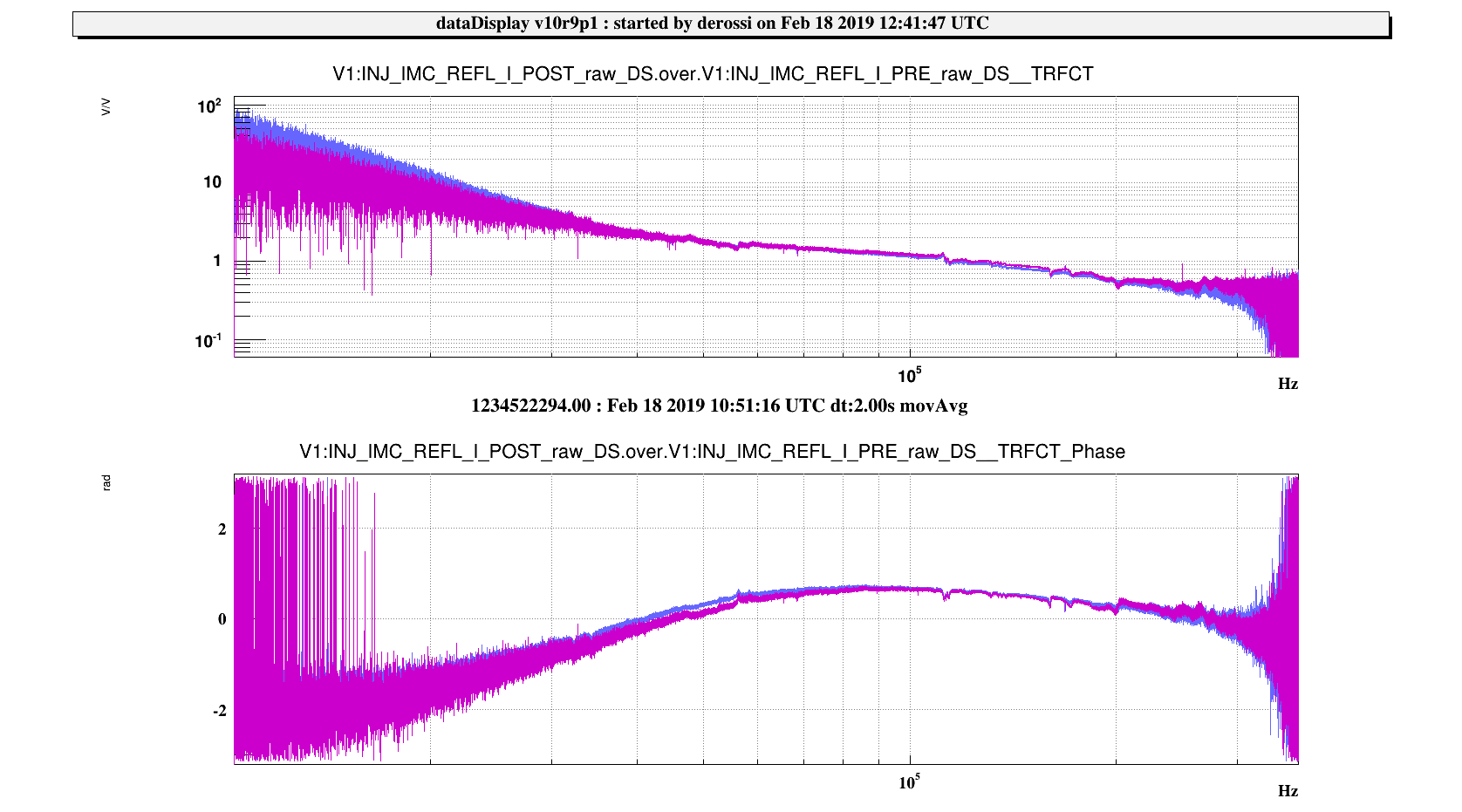
We finally remeasured the IMC trasfer function, which is shown on the 3rd plot in blue, compared with the previous one in pink.

{kind=link}
{kind=link}
{kind=link}