In preparation for ER12 I checked the OLTF for DARM, MICH and PRCL in the LOW_NOISE_2 state; while I did not expect big changes for DARM and PRCL, the change of error signal for MICH triggered the need for this update:
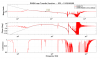
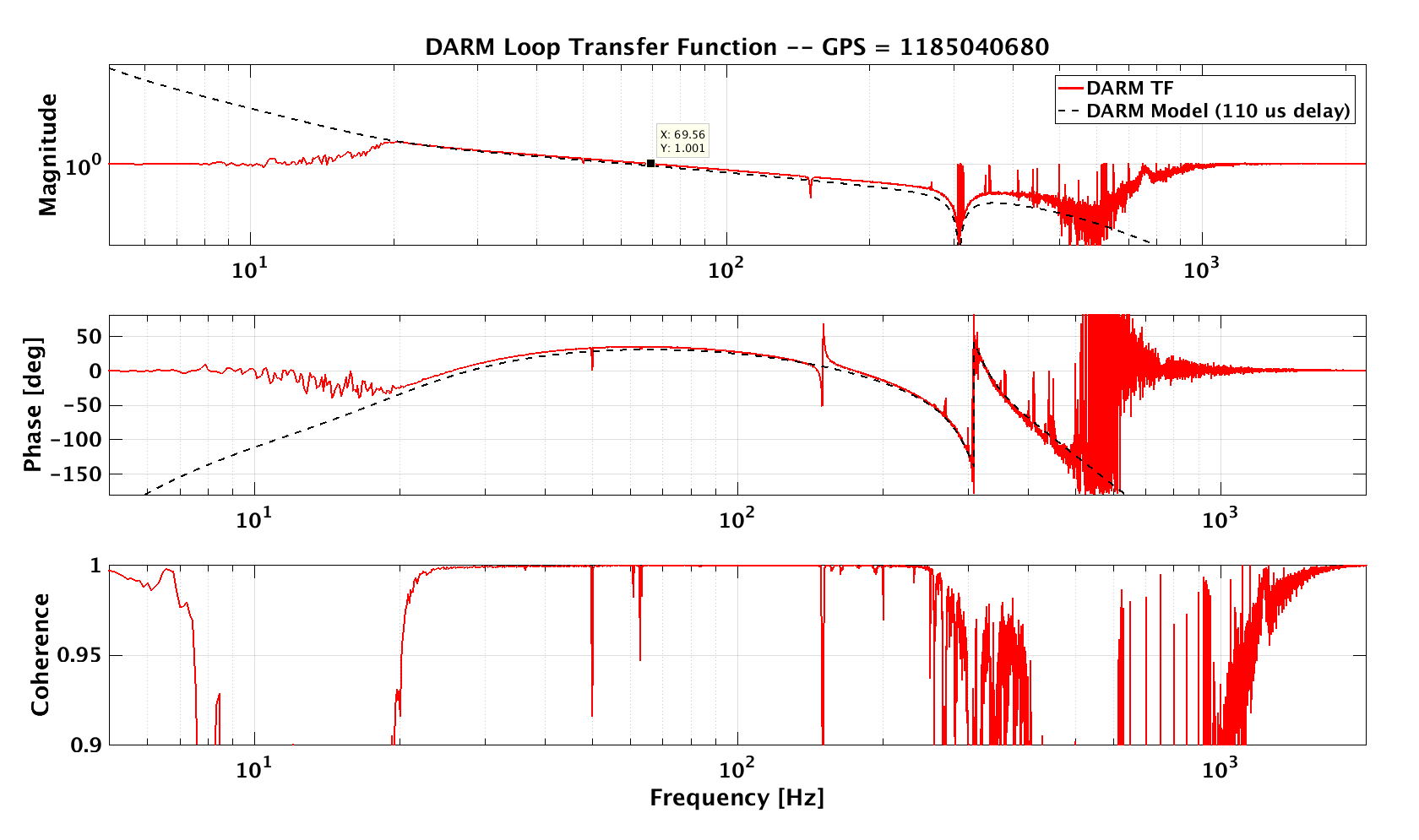
- the DARM loop has the usual UGF around 70 Hz, nothing has changed (Figure 1);
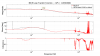
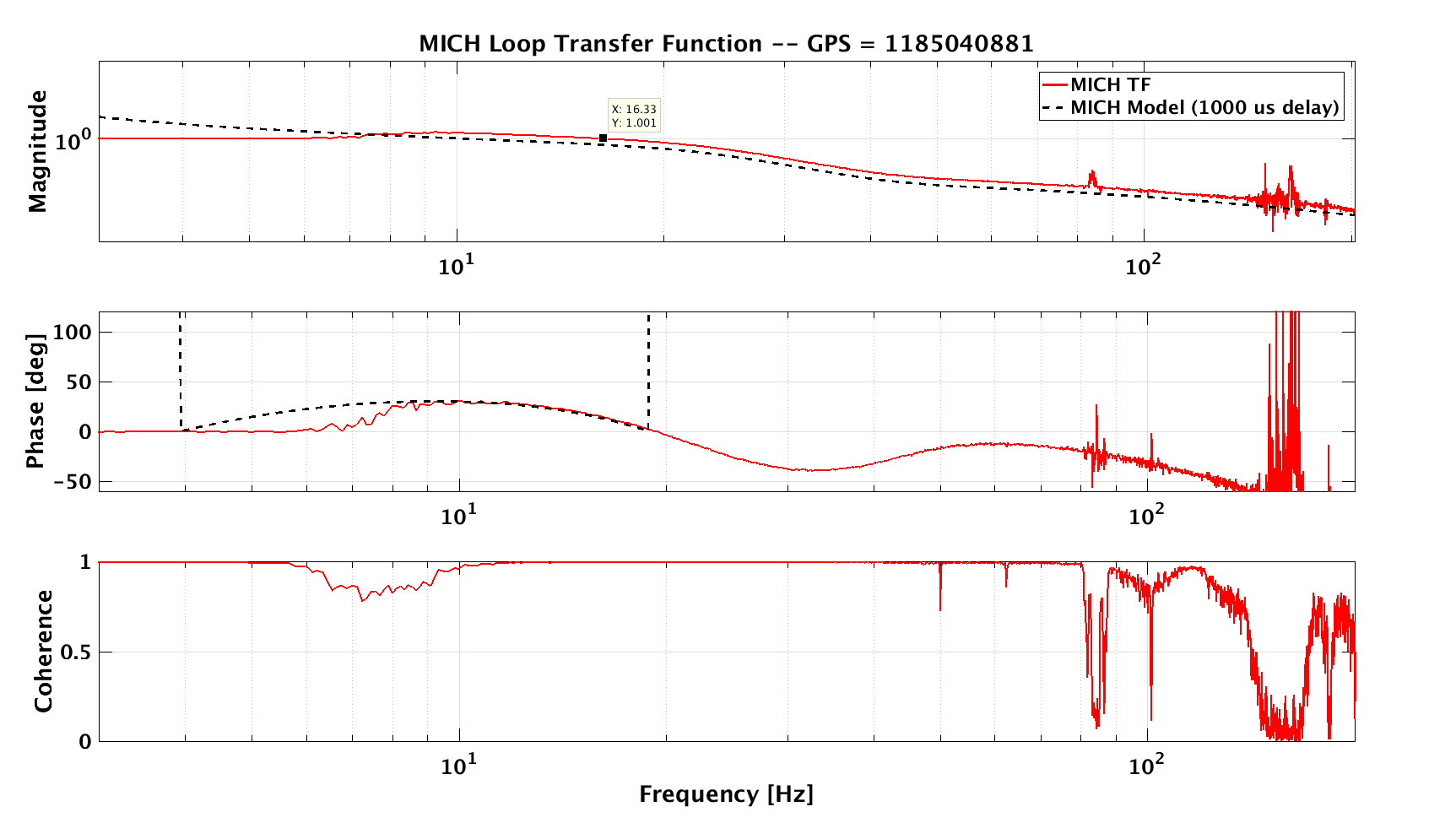
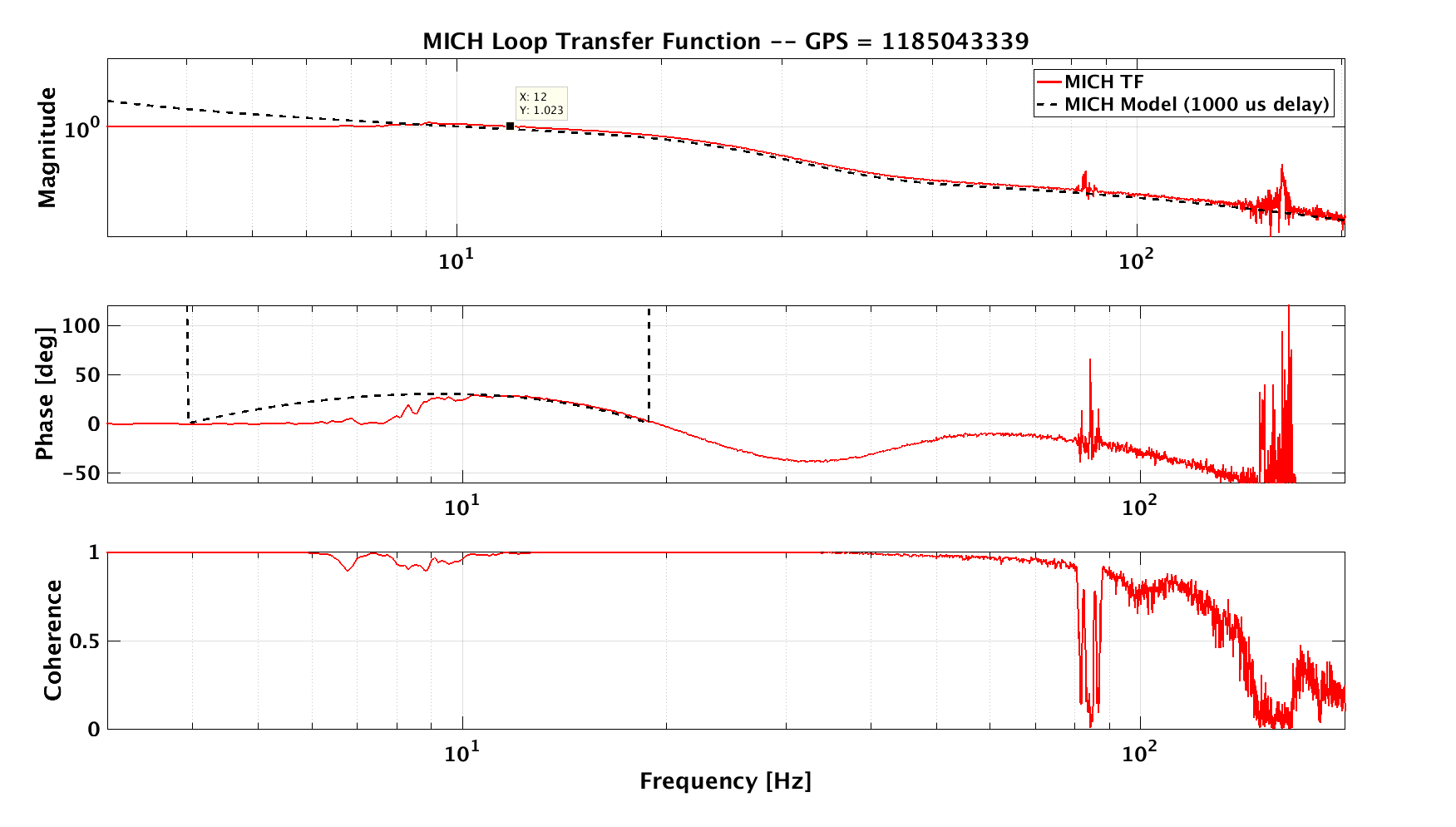
- MICH's UGF seemed a bit high, around 16.3 Hz (Figure 2); I changed the sensing matrix element for the last signal (in order to keep the usual gain valid for any signal) and reduced it to bring the UGF to ~ 12 Hz (Figure 3); the nominal UGF should be 10 Hz, but given the usual loss of phase margin on the lower end of this loop, for the time being I left it at 12 Hz;
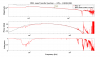
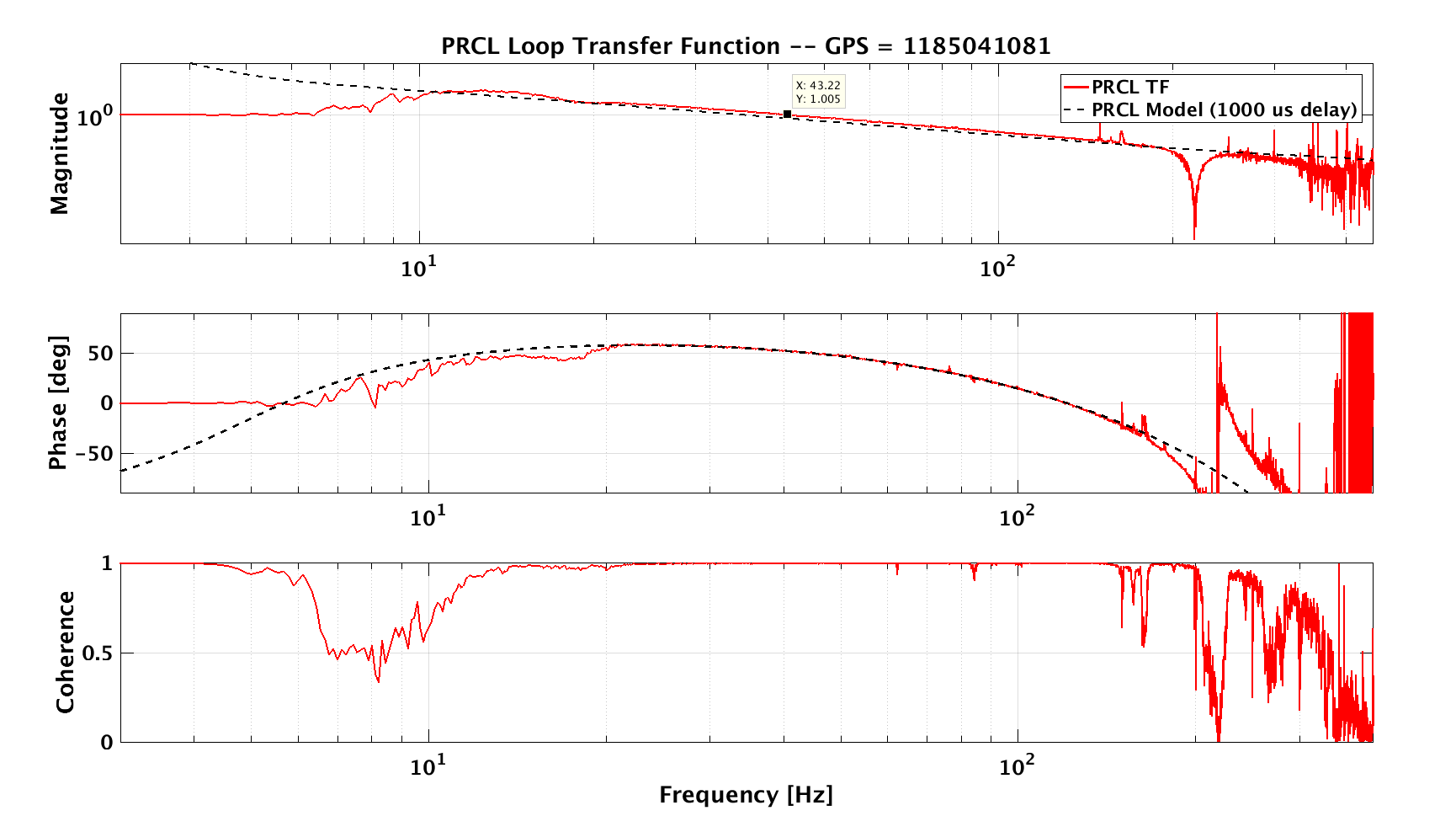
- PRCL's UGF is very slightly higher than usual, but it shouldn't be a problem (Figure 4);
I took the chance, while still in LOW_NOISE_2, to de-normalize the error signal for PRCL from B2_8MHz/(B1p+B4) to plain B2_8MHz, then measure the OLTF again to fine tune the sensing weight in order to have the same UGF, should we decide to switch to this signal; I tuned this sensing weight to have the UGF at 40 Hz, and both this and the new sensing element for MICH are already saved in ITF_LOCK.ini.
At the end, I went to LOW_NOISE_3 in order to make a set of measurements there; after a couple of unlocks immediately after reaching such state, I reduced the gains of the DIFFp alignment loop from 1.0 to 0.4, and then i could perform the measurements; with the same (DARM aside) gain/sensing elements as the fine-tuned LOW_NOISE_2 configuration, the results were:
- I decided to use DARM_SET = 0.003 (B1_DC = 9.375 mW) to avoid the risk of other unlocks or adjustments; the gain was already roughly adjusted for this purpose during the last tests we did with this configuration, as DARM_GAIN = 4.25;
- DARM has its UGF at 73 Hz with this configuration, which seems perfectly fine;
- MICH has its UGF at 12.44 Hz, which is a very little deviation from LOW_NOISE_2;
- PRCL has its UGF unaltered at 40 Hz.
Some GPSs (all injections lasted 180 s each):
-
LOW_NOISE_2:
- CLEAN = 1185040483;
- DARM = 1185040680 (UGF = 69.6 Hz);
- MICH = 1185043339 (UGF = 12 Hz);
- PRCL = 1185041081 (normalized, UGF = 43 Hz);
- PRCL = 1185044962 (de-normalized, UGF = 40 Hz);
-
LOW_NOISE_3:
- CLEAN = 1185047602;
- DARM = 1185047799 (UGF = 73 Hz);
- MICH = 1185048000 (UGF = 12.44 Hz);
- PRCL = 1185048200 (UGF = 40 Hz).
In principle all these measurements could be used for tuning the Alpha and Beta subtractions, but I'm not sure about the outcome since the ITF is not in its standard condition. Anyway I will look into those offline.
Now the LOW_NOISE_3 state takes into account the gain change for the DIFFp alignment loop and nothing has to be done manually.
While doing all this, I noticed that the excess noise we found yesterday has been quite rapidly fading away over the last couple of hours, with only a bump in the 10-20 Hz region but still the peaks (although smaller) at 84 and 160 Hz still showing up. For all these measurements I kept the DARM UGF line 5x higher in amplitude, as the 84 Hz peak was pretty much covering it; this is saved in ITF_LOCK.ini, but probably tomorrow morning we can restore the usual line amplitude.

{kind=link}
{kind=link}
{kind=link}
{kind=link}