ITF found in Science Mode. It unlocked at 14:41 UTC due to saturation of the End Suspensions ( see attached plot #1 ).
Back at LOW_NOISE_3_SQZ at 15:03 UTC, Switched to Calibration mode to perform the weekly Calibrations:
From 15:03 UTC to 15:25 UTC - Angular Noise Injections;
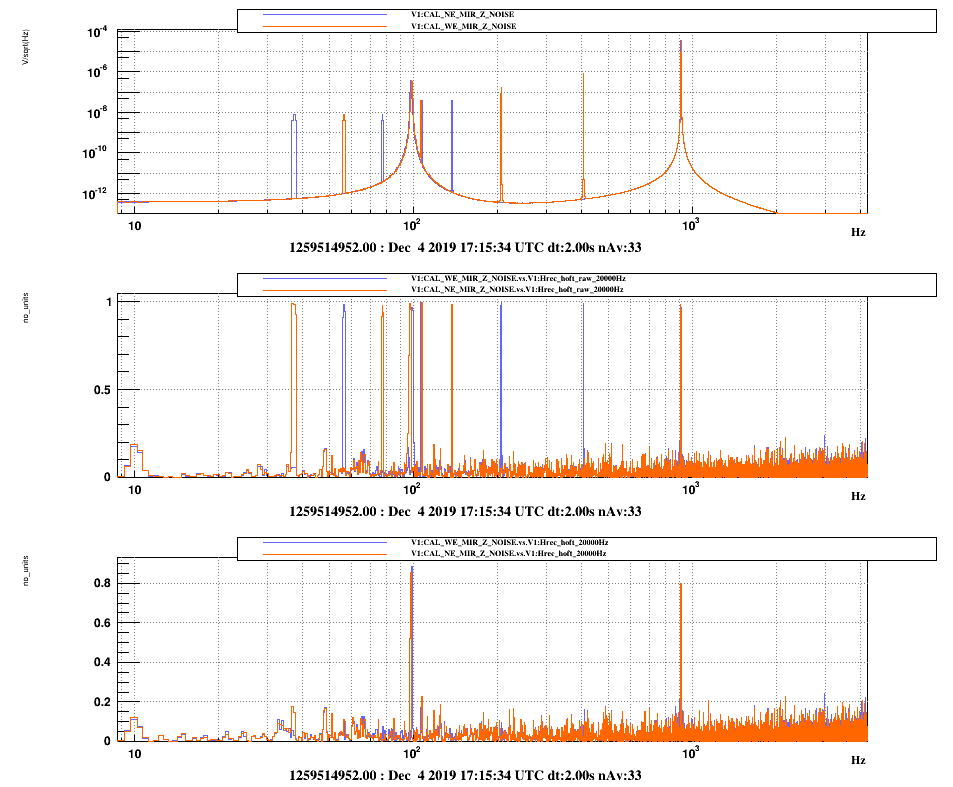
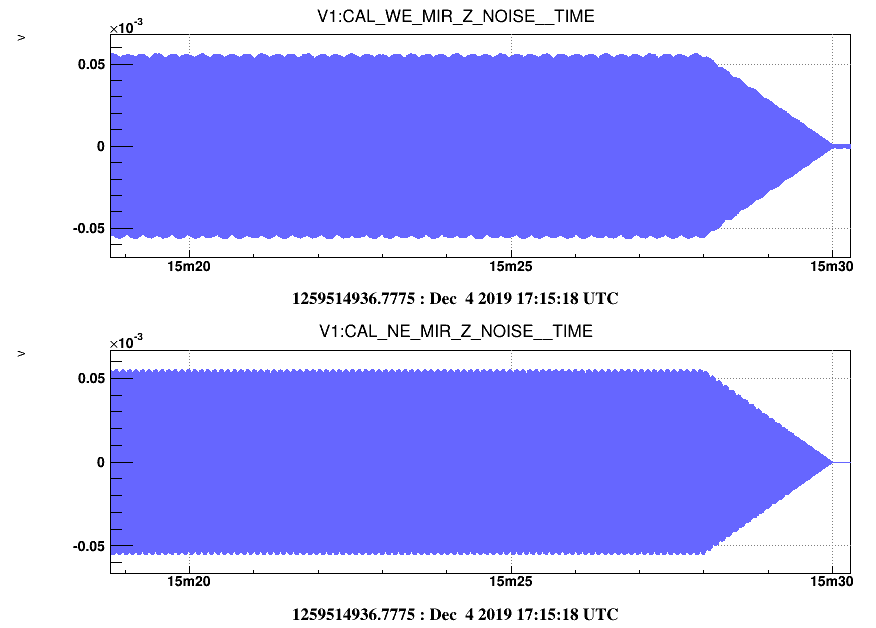
From 15:26 UTC to 15:42 UTC - Longitudinal Noise Injections;
From 15:52 UTC to 15:55 UTC - PR optical Response Estimation;
From 15:42 UTC to 16:13 UTC - AA Tuning Test, performed by J. Brooks;
From 16:17 UTC to 17:51 UTC - CALIBRATED_DF_PCAL;
Due to a GW alert received during the last Calibration, in agreement with the Run Coordinator, I Set the ITF back in Science Mode at 17:55 UTC.
Switched to Adjusting mode from 19:10 UTC to 19:30 UTC to recovery the Vertical correction of SNEB before it would open the loops. Unfortunately during this operation the ITF unlocked at 19:30 UTC ( see attached plot #2 ).
ITF relocked at first attempt, back in Science Mode from 20:09 UTC.
Guard Tour
18:32 UTC - 19:04 UTC;
20:47 UTC - 21:14 UTC;
Other
Weekly check of the DMS shelved flags, see attached report.
ISC
In agreement with J. Brooks and M. Mantovani at 20:41 UTC I enabled the AATuning servo with 20 iterations. Loop in progress.
ISC
(04-12-2019 13:00 - 04-12-2019 15:20) From remote
Status: Ended
Description: Troubles on keeping ITF stable locked.
Actions undertaken: M. Mantovani investigated the issue of the locking stability of the ITF. No major issue were found.
SBE
(04-12-2019 19:15 - 04-12-2019 19:45) Operator on site with expert from remote
Status: Ended
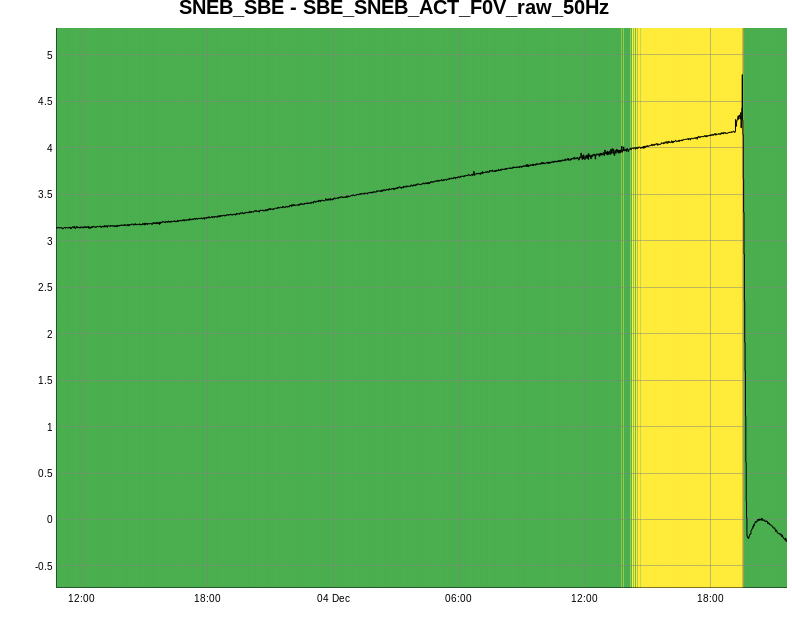
Description: Since Yesterday afternoon the Vectical correction of SNEB increased ( see attached plot #3 ). The related flag became yellow at the beginning of the shift, reporting that the loops of the bench could open if the value became too big.
Actions undertaken: At 19:10 UTC I switched to Adjusting mode in order to move the vertical position of the bench, but when I tried to act on the motors I saw no feedback on the signals. I contacted the SBE Oncall ( A. Bertolini ) that guided me through the procedure. Using the motor #4 we were able to slowly return the value around 0, but the behavior of the movement was not linear, showing some sort of resistance ( see attached plot #4 ).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}